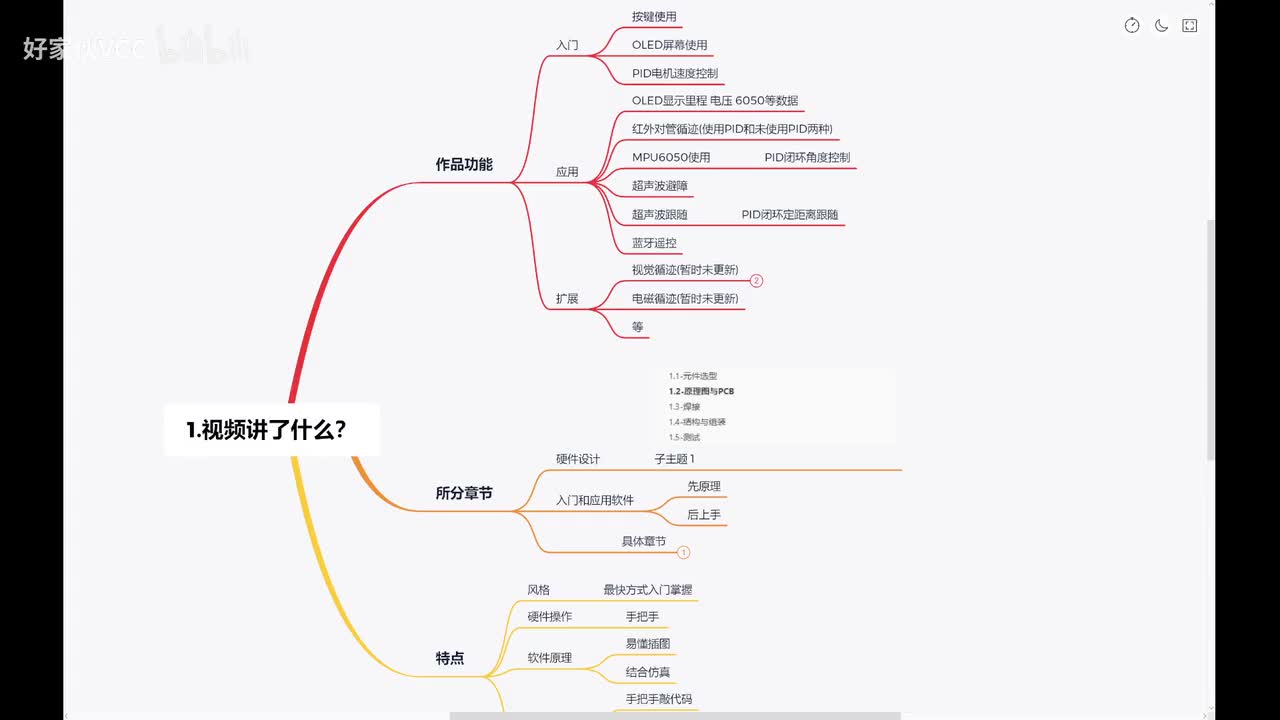
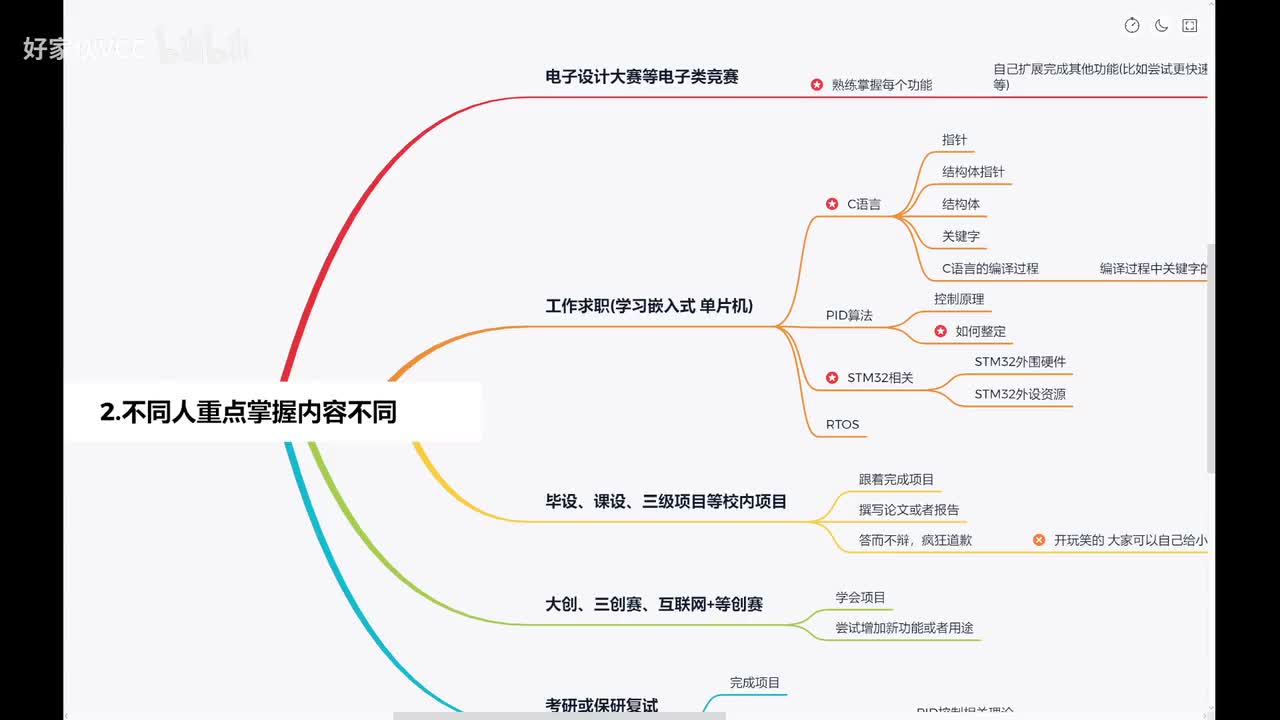
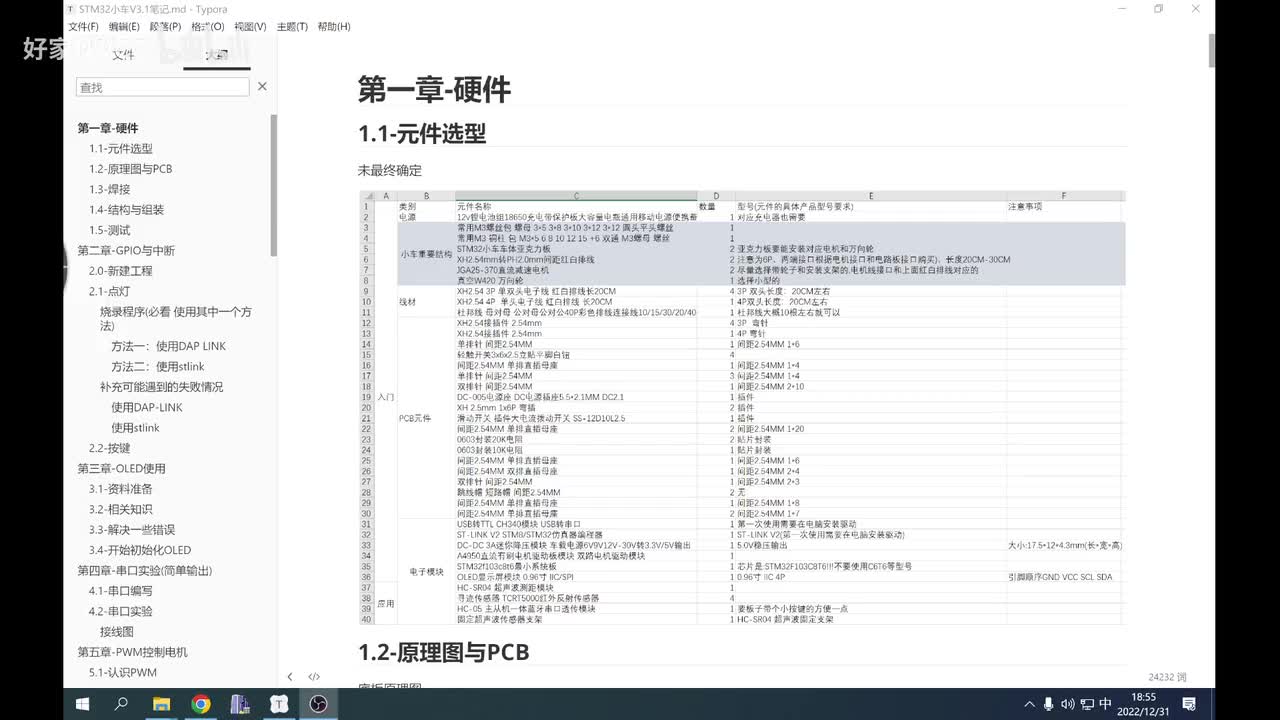
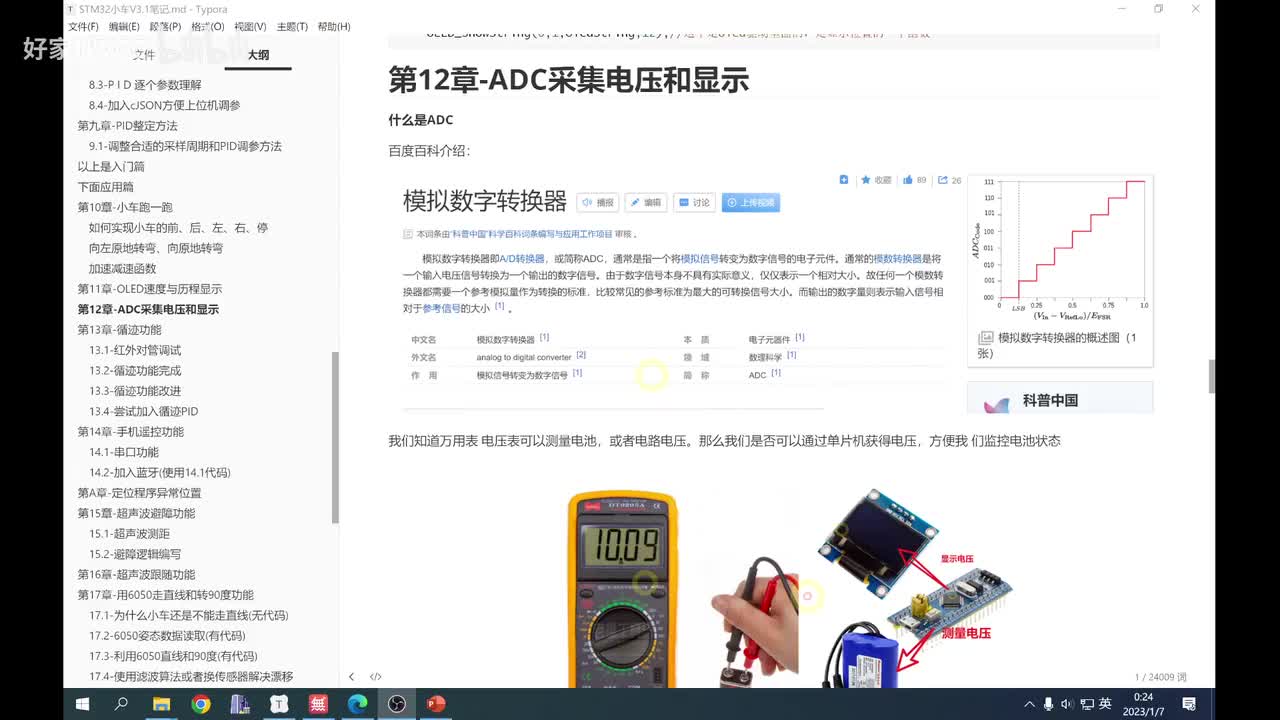
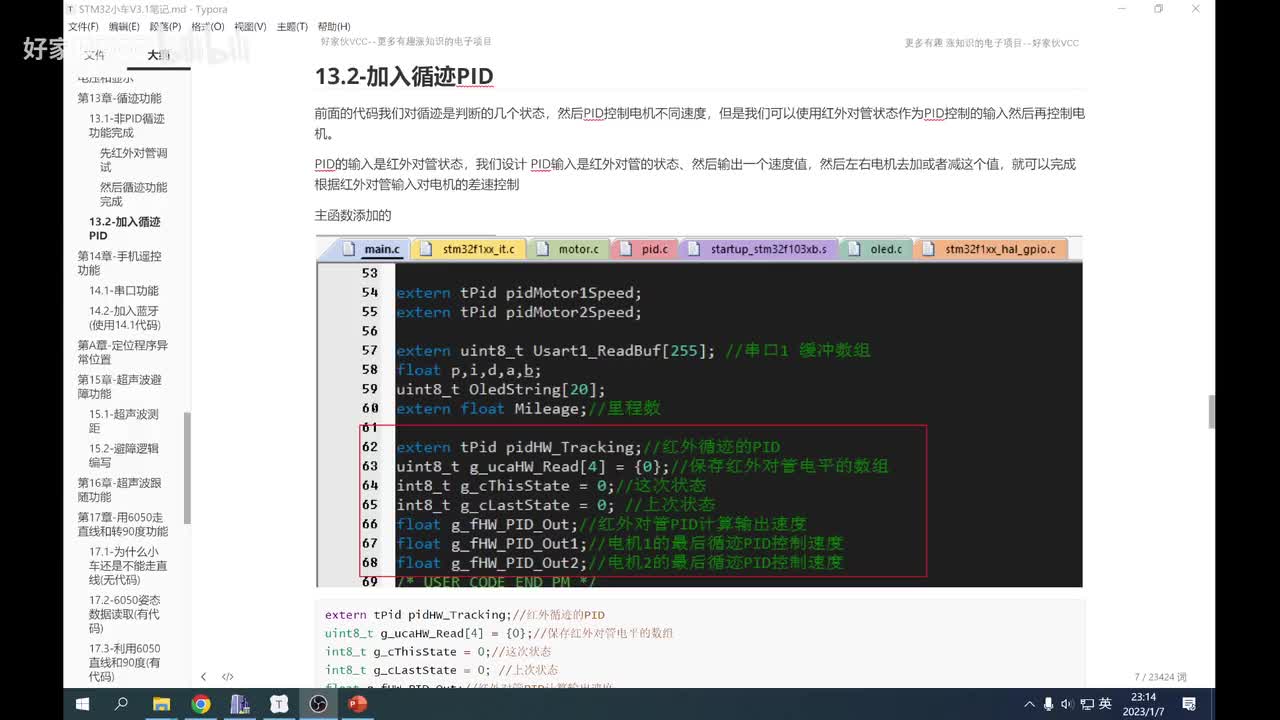
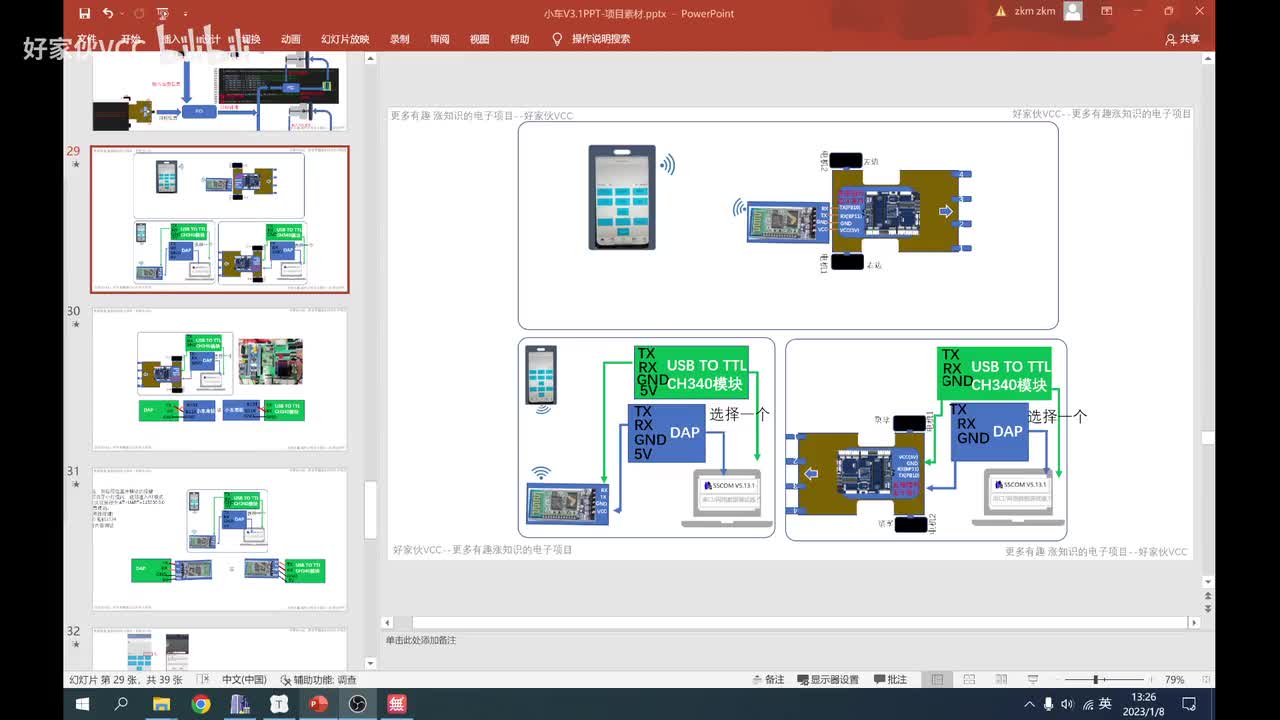
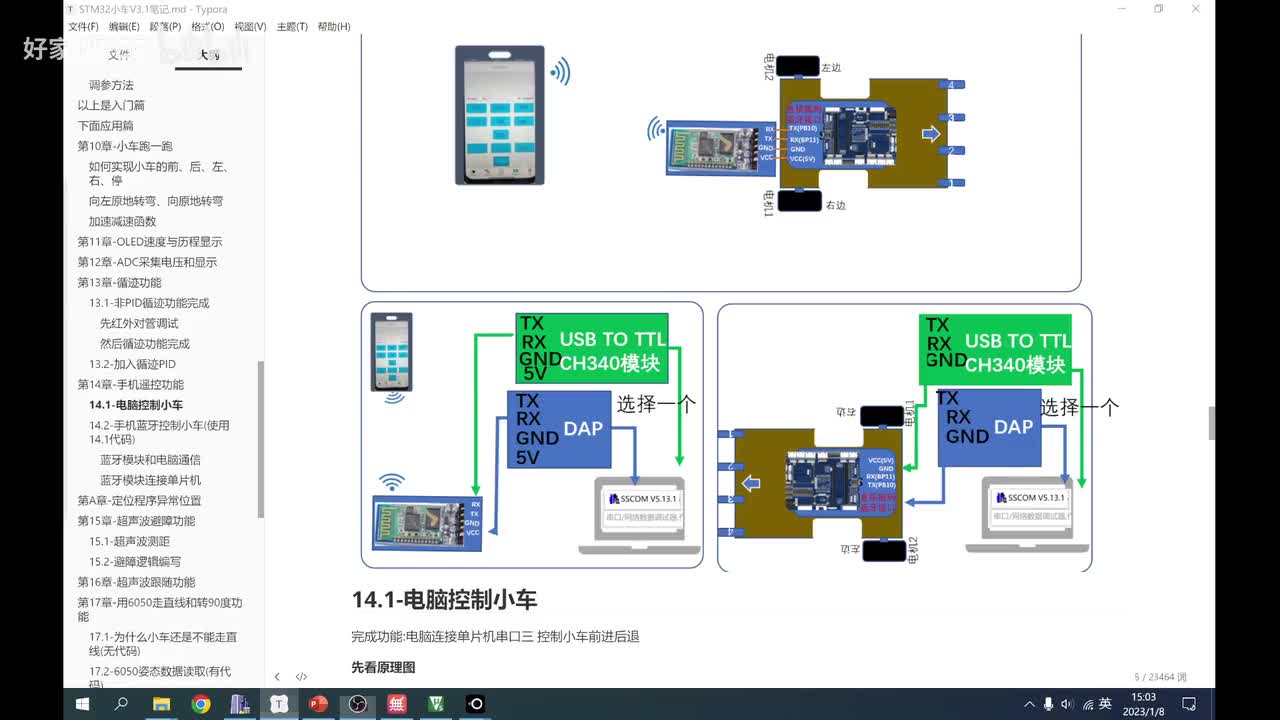
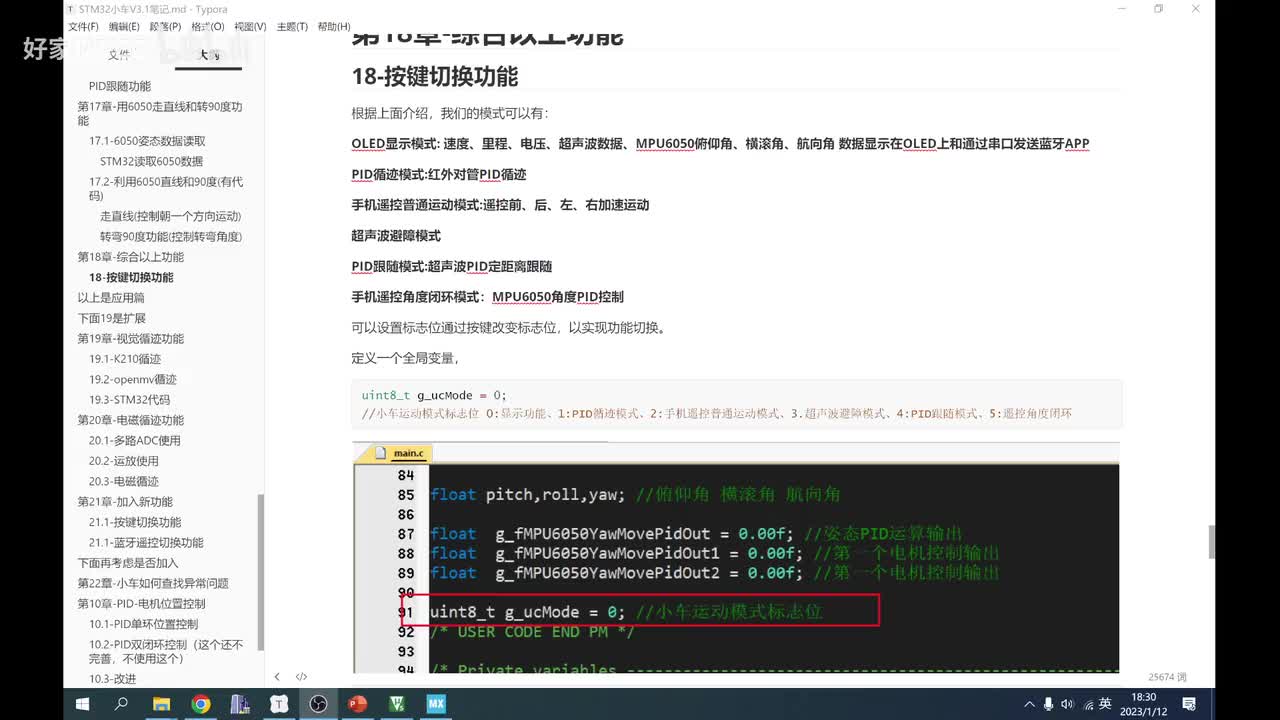
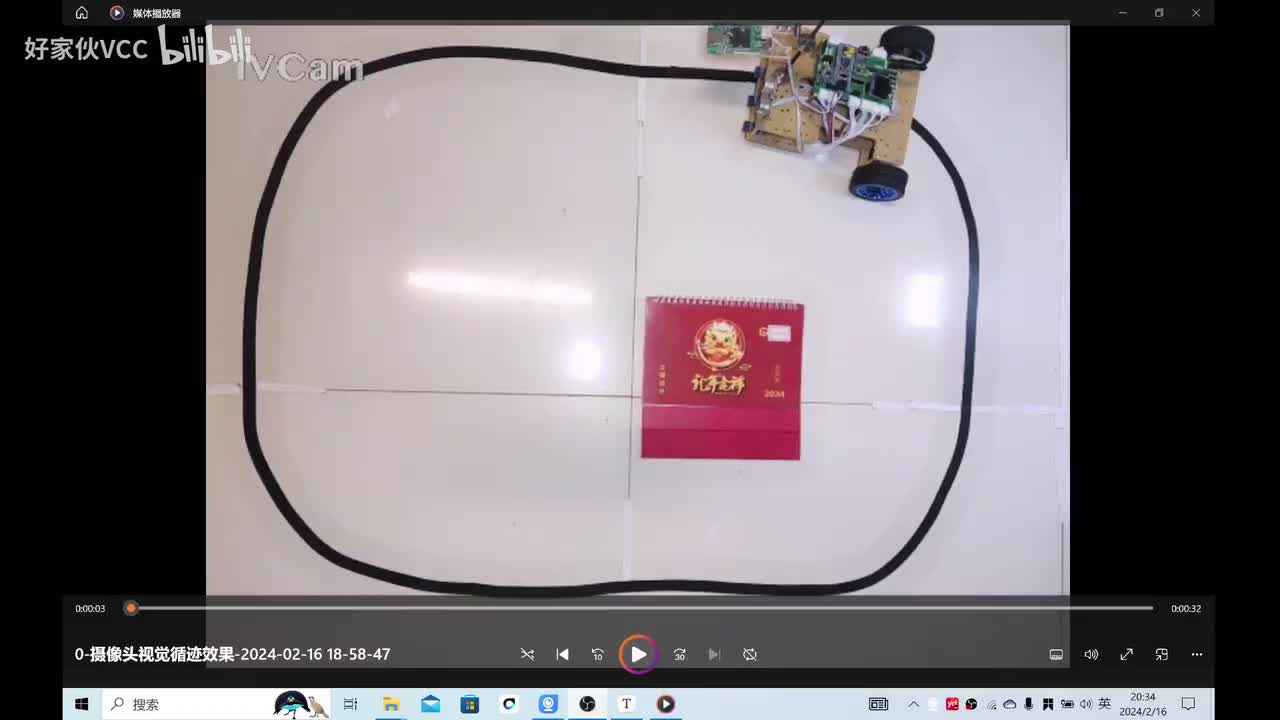
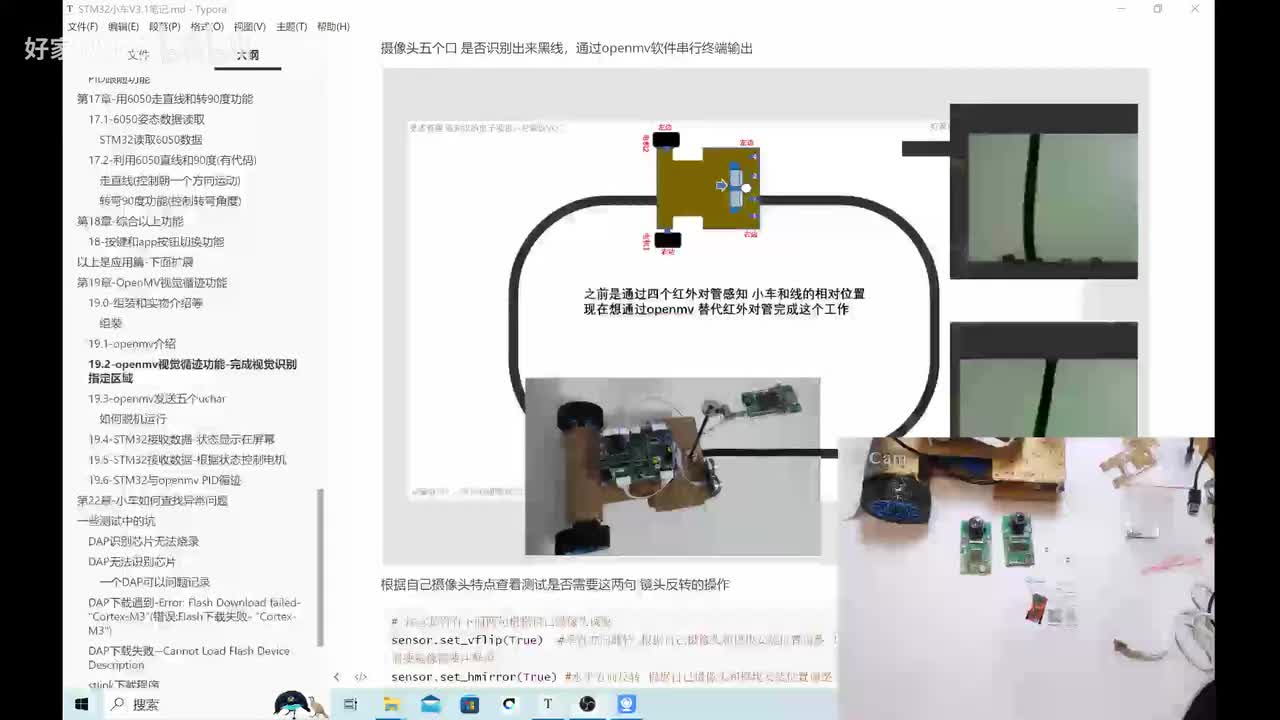
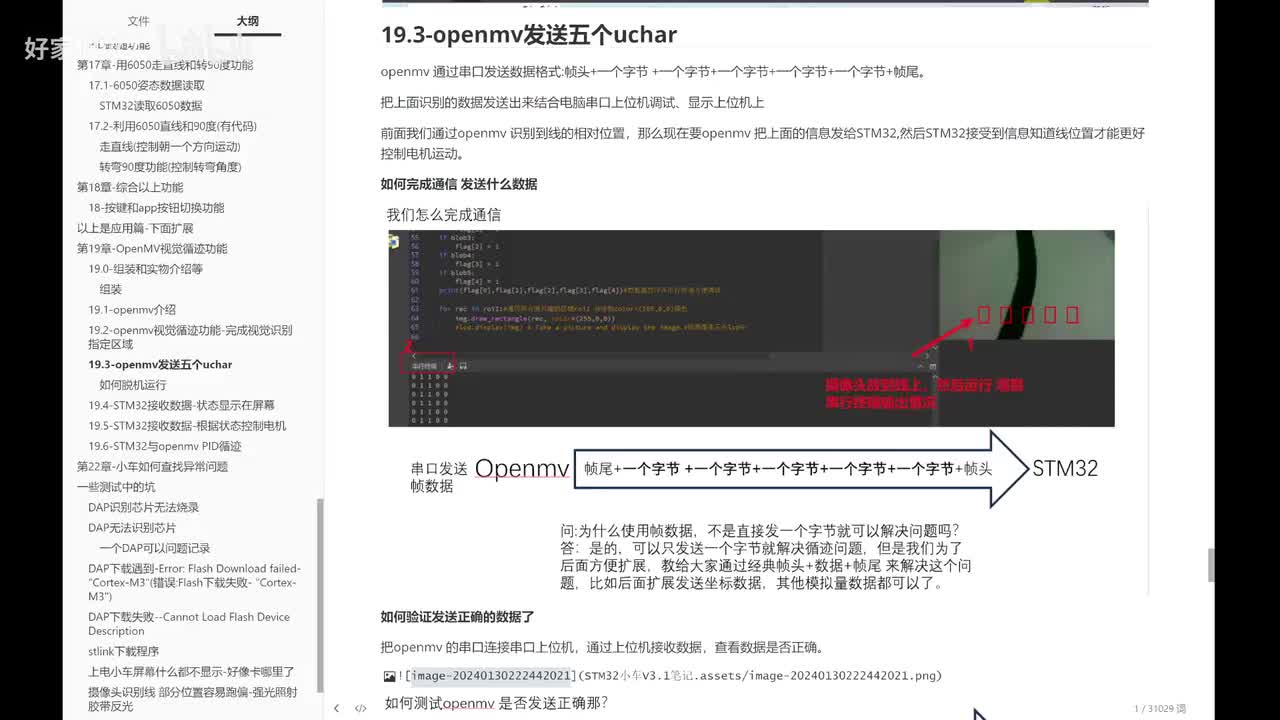
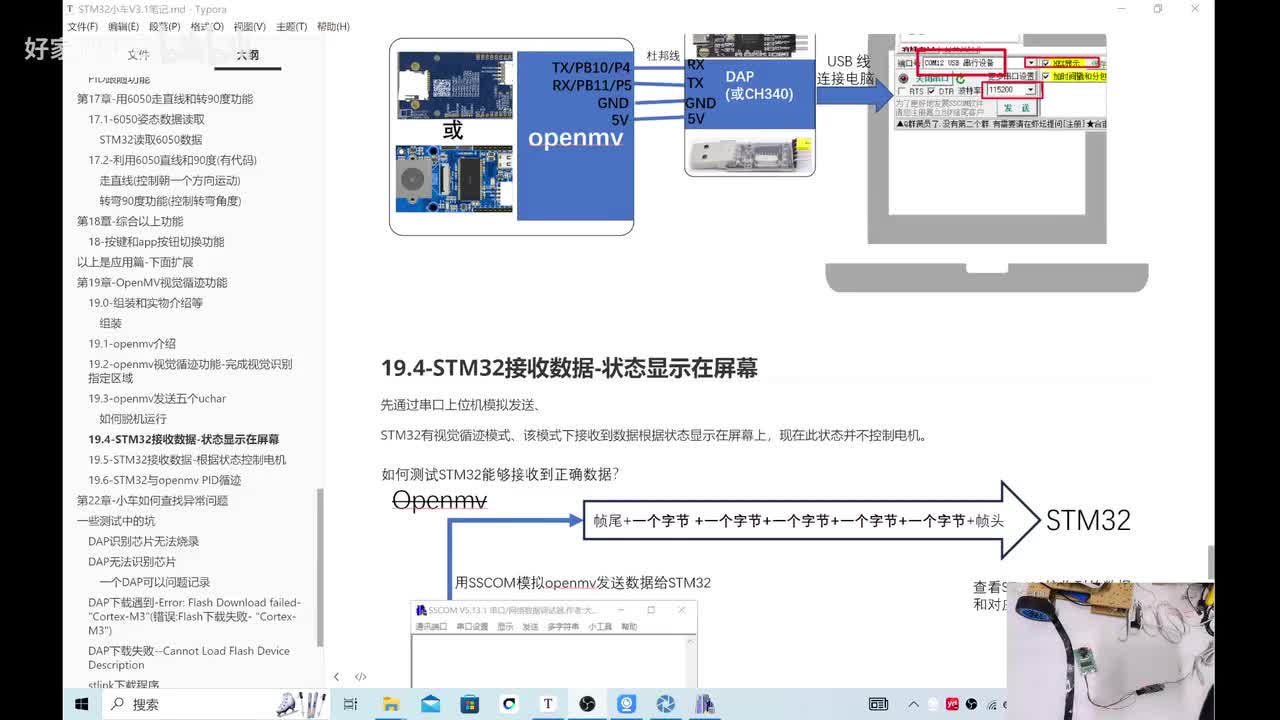
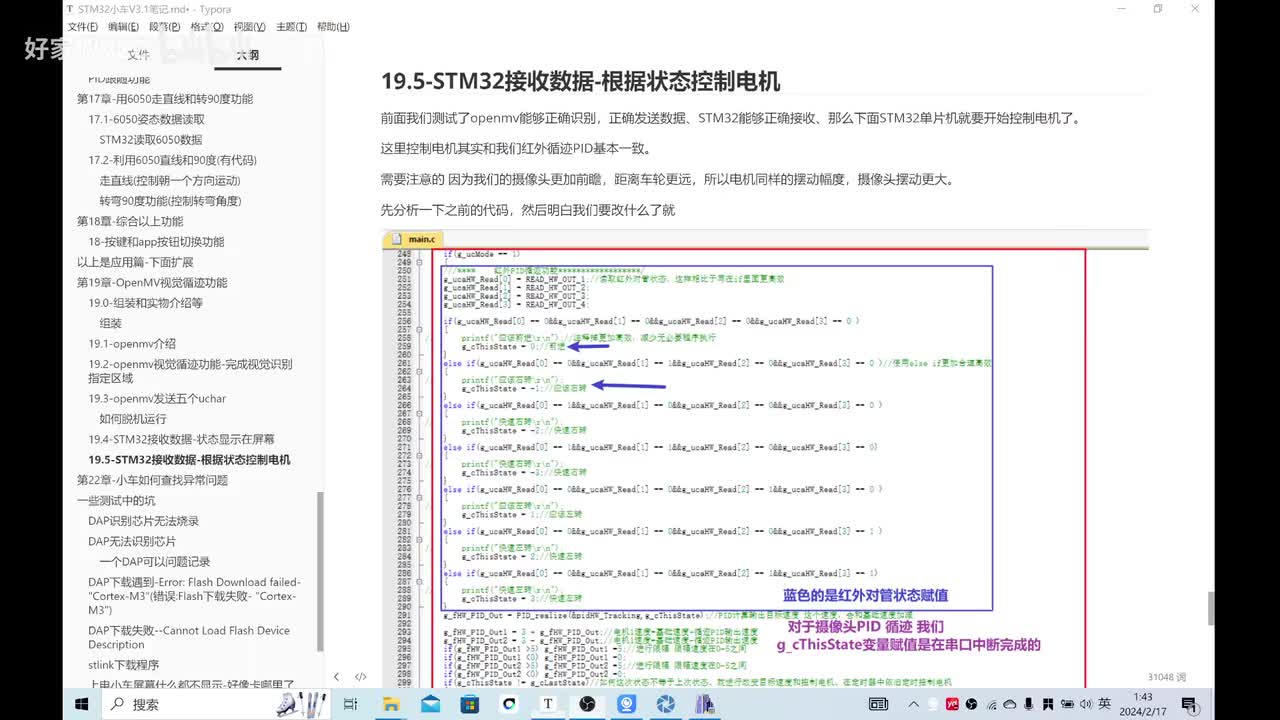
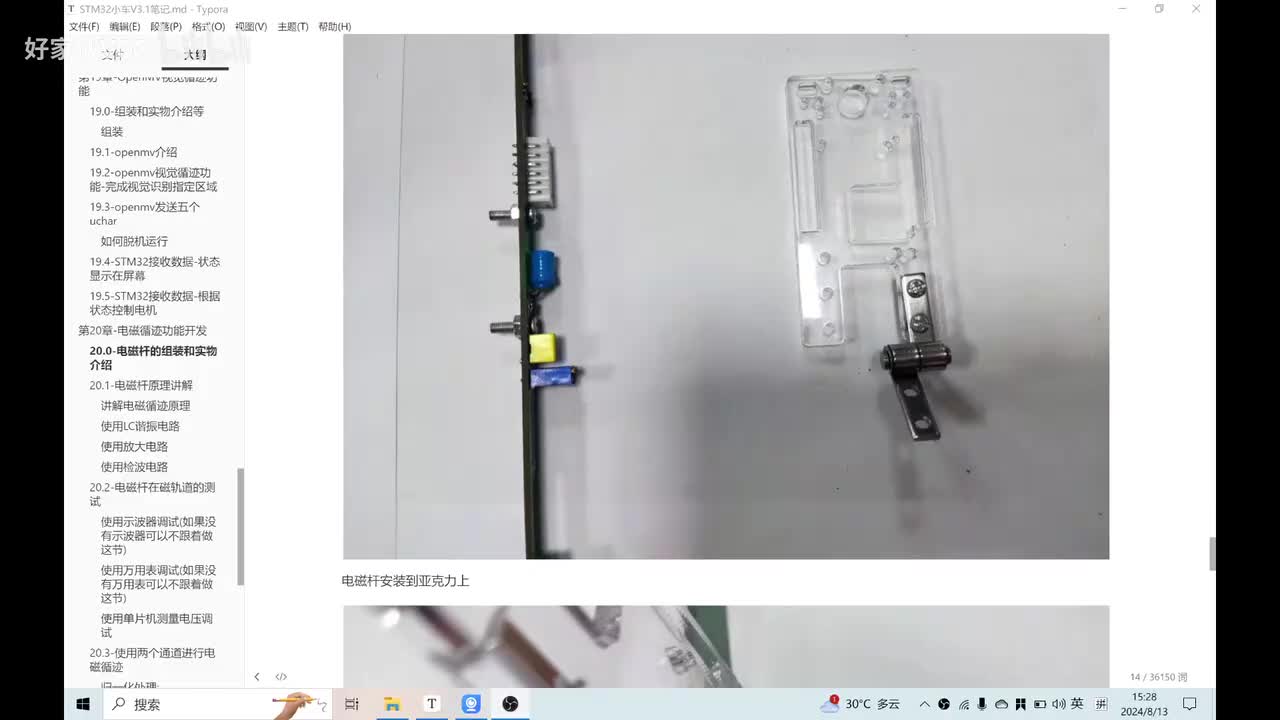
视频选集 0-尴尬的抠出三室一厅的宣传视频-入门和应用篇部分功能展示 0-必看-视频讲了什么 0-必看-不同人重点掌握内容不同 0-硬件内容前情提要 硬件-焊接PCB元件与稳压模块 硬件-组装车架-安装PCB-安装超声波模块等-(使用W420万向轮安装方法) 1-新建工程-点亮小灯-代码烧录 2-按键与外部中断 3-OLED模块驱动程序 4--串口输出功能与CH340模块和DAP模块使用方法 5-PWM输出和MDK如何仿真 6.1-认识电机驱动A4950 6.2-电机转速和方向控制初体验 6.3电机开环PWM转速和方向控制 7.1和7.2-电机编码器介绍和STM32单片机编码器接口模式介绍 7.3-获得单编码器计数值变化量 7.4-主函数中测量计算转速 7.5-定时器中断定时测量速度和修正速度测量与设置函数 8.1-速度闭环控制初体验 8.2-准备工作-匿名上位机曲线显示速度波形方便观察数据 8.3-PID算法初步体验与算法理解 8.4-加入cJSON方便运行适合串口调参 9-1调整采样周期和PID调参方法 10-小车运动控制 11-里程计算和速度显示 12-ADC采集电压和显示 13.1-红外对管循迹没有使用PID版本- 13.2-红外对管PID循迹 14.1-电脑串口控制小车运动 14.2-手机蓝牙遥控小车运动 15.1-超声波测距功能 15.2-超声波避障功能 16-无PID超声波跟随和有PID超声波跟随 17.1-MPU6050初始化移植数据读取实验 17.2-借助MPU6050 PID闭环朝指定方向运动和旋转指定角度 18-以上入门和应用的综合测试视频 19.0.0-openmv教程-openMV摄像头视觉循迹部分效果演示-stm32入门教程-STM32智能小车 19.0-openmv教程-openmv摄像头支架-组装和实物介绍等-stm32入门教程-STM32智能小车 19.1-openmv教程-openmv介绍-相关介绍-stm32入门教程-STM32智能小车 19.2-(这个视频可能有点糊 后面替掉)-openmv视觉循迹功能-完成视觉识别指定区域-stm32入门教程-STM32智能小车 19.3-openmv与STM32通信-openmv发送五个uchar-stm32入门教程-STM32智能小车 19.4-openmv与STM32通信-STM32接收数据-状态显示在屏幕-stm32入门教程-STM32智能小车 19.5-openmv与STM32通信-STM32接收数据-根据状态控制电机-stm32入门教程-STM32智能小车 20.0-电磁循迹电磁杆组装和实物介绍-STM32智能小车电磁循迹 20.0.0-电磁循迹电磁杆-如何更换电感-维修调试说明-1 -如果电磁杆不能使用可以看这里调试 20.1-电磁杆原理图讲解-LC谐振电路-放大电路-检波电路 20.2-1示波器测试电磁杆-电磁杆在磁轨道的测试 20.2-2万用表测试电磁杆-电磁杆在磁轨道的测试 20.2-3编写代码单片机测量四个通道测试电感电压值-电磁杆在磁轨道的测试 20-3两通道电感电磁循迹非PID版本_已经编辑过的_x264_压制过的 20-4STM32智能小车PID循迹代码 21.0.1-[ 为什么要讲RTOS ] FreeRTOS快速入门 FreeRTOS移植 FreeRTOS快速开发 21.0.2-[为什么选FreeRTOS] freeRTOS项目 freeRTOS项目实战 RTOS实时操作系统 21.1.0-[FreeRTOS任务里面是什么多个任务如何在单核MCU] 同时运行 FreeRTOS是什么 RTOS实时操作系统 21.1.1-[ 什么是时间片的抢占式任务调度方式 ] rtos原理 freeRTOS调度算法 FreeRTOS快速入门指南 21.2-[工程中添加FreeRTOS] STM32cubemx HAL库 freeRTOS移植 FreeRTOS快速入门 rtos实时操作系统 rtos项目 21.3-[启动流程 编码风格 freeRTOS教程] FreeRTOS移植 rtos 实时操作系统 FreeRtos项目实战 21.4-[系统配置 FreeRTOS相关配置宏定义] Config宏 INCLUDE_宏定义 freeRTOS学习笔记 FreeRTOS开源项目 22.1-[任务的状态 任务状态] FreeRTOS移植 FreeRTOS项目 FreeRTOS开源项目 FreeRTOS调度算法 22.2-[任务的创建] 使用STM32cubemx创建任务 HAL库创建任务 keil MDK编程 FreeRTOS任务创建调度 22.3.1-[任务栈 和 系统可用堆 知识] FreeRTOS任务栈大小设置技巧 FreeRTOS项目 FreeRTOS学习笔记 面试题汇总 22.3.2-[任务栈 和 系统可用堆] 获得高水位线 freeRTOS项目教程 FreeRTOS实战项目 FreeRTOS入门教程 22.4.1-[任务优先级相关 如何确定任务优先级] 任务优先级如何设置 FreeRTOS任务优先级 FreeRTOS实战项目 22.4.2-[FreeRTOS中断优先级相关讲解] 中断及其ISR的设计原则 中断级FromISR函数 freeRTOS项目 22.5.1.1-[PendSV调度] 优先级最高的就绪任务 FreeRTOS任务切换 任务调度过程 22.5.1.2-[带时间片的抢占式调度] FreeRTOS时间片调度 FreeRTOS实战项目 FreeRTOS原理分析 22.5.1.3-[基于时间片的抢占式任务调度动画演示] FreeRTOS调度算法 FreeRTOS实战项目 FreeRTOS入门教程 FreeRTOS移植 22.5.2-[多任务创建和调度] FreeRTOS调度算法 抢占式任务调度 22.6.0-[实现裸机的功能]-通过裸机 FreeRTOS项目实战 智能车 22.6.1-[实际测试几个功能是否正常] 测试FreeRTOS实战项目代码 FreeRTOS项目 23.1.0-[消息队列和全局变量对比] FreeRTOS消息队列 任务之间通信和同步 23.1.1-[消息队列的概念和函数] 消息队列如何完成任务之间通信 FreeRTOS原理讲解 任务之间通信讲解 23.1.2-[通信同步过程分析] 消息队列同步过程分析 消息队列完成任务同步和通信 23.1.3-[消息队列编程测试] FreeRTOS实战编程 消息队列实战任务通信 23.2.1-[编写MPU6050初始化] 增加MPU6050读取和初始化次数限制 23.2.2-[测试MPU6050和角度控制] 01_论文撰写和毕业设计教程说明[论文 毕设指导教程] 02_通用形毕设_选择导师和毕设任务书[论文 毕设指导教程] 03_通用毕设_开题报告 中期报告 毕业论文撰写 毕设答辩[论文 毕设指导教程] 04_智能车嵌入式类毕设毕业设计怎么做?[论文 毕设指导教程]





![21.0.1-[ 为什么要讲RTOS ] FreeRTOS快速入门 FreeRTOS移植 FreeRTOS快速开发](http://i1.hdslb.com/bfs/storyff/n241222sa252vwmnvc8ag91p33gqgrb8_firsti.jpg)
![21.0.2-[为什么选FreeRTOS] freeRTOS项目 freeRTOS项目实战 RTOS实时操作系统](http://i2.hdslb.com/bfs/storyff/n241223sa1h0hdcd7j0x2swgzalk9k7a_firsti.jpg)
![21.1.0-[FreeRTOS任务里面是什么多个任务如何在单核MCU] 同时运行 FreeRTOS是什么 RTOS实时操作系统](http://i1.hdslb.com/bfs/storyff/n241223sa1g51eimafp4s73hvv1ur58v_firsti.jpg)
![21.1.1-[ 什么是时间片的抢占式任务调度方式 ] rtos原理 freeRTOS调度算法 FreeRTOS快速入门指南](http://i1.hdslb.com/bfs/storyff/n241223sa1d0nuun6777og2v2t5rjzja_firsti.jpg)
![21.2-[工程中添加FreeRTOS] STM32cubemx HAL库 freeRTOS移植 FreeRTOS快速入门 rtos实时操作系统 rtos项目](http://i1.hdslb.com/bfs/storyff/n241223sa5bxia9s15vz5325oy4eur5x_firsti.jpg)
![21.3-[启动流程 编码风格 freeRTOS教程] FreeRTOS移植 rtos 实时操作系统 FreeRtos项目实战](http://i1.hdslb.com/bfs/storyff/n241223safy6v5izw0bfi1tiqzdwgmpr_firsti.jpg)
![21.4-[系统配置 FreeRTOS相关配置宏定义] Config宏 INCLUDE_宏定义 freeRTOS学习笔记 FreeRTOS开源项目](http://i0.hdslb.com/bfs/storyff/n241223sa14r6gmuuup3pz23d9125ed0_firsti.jpg)
![22.1-[任务的状态 任务状态] FreeRTOS移植 FreeRTOS项目 FreeRTOS开源项目 FreeRTOS调度算法](http://i1.hdslb.com/bfs/storyff/n241223sa1qv5q8angndintpcb6fdt9e_firsti.jpg)
![22.2-[任务的创建] 使用STM32cubemx创建任务 HAL库创建任务 keil MDK编程 FreeRTOS任务创建调度](http://i2.hdslb.com/bfs/storyff/n241223sa12761u8f1hsvj3nmq3u8am3_firsti.jpg)
![22.3.1-[任务栈 和 系统可用堆 知识] FreeRTOS任务栈大小设置技巧 FreeRTOS项目 FreeRTOS学习笔记 面试题汇总](http://i0.hdslb.com/bfs/storyff/n241223sa3t4mhjdvrsvog1aljm67qzg_firsti.jpg)
![22.3.2-[任务栈 和 系统可用堆] 获得高水位线 freeRTOS项目教程 FreeRTOS实战项目 FreeRTOS入门教程](http://i1.hdslb.com/bfs/storyff/n241223sa383j8xqua0jiz1m26uiyz78_firsti.jpg)
![22.4.1-[任务优先级相关 如何确定任务优先级] 任务优先级如何设置 FreeRTOS任务优先级 FreeRTOS实战项目](http://i0.hdslb.com/bfs/storyff/n241223sa2ubminb3lysj3ifei6ng9rn_firsti.jpg)
![22.4.2-[FreeRTOS中断优先级相关讲解] 中断及其ISR的设计原则 中断级FromISR函数 freeRTOS项目](http://i1.hdslb.com/bfs/storyff/n241223sal57zqe3nyl1j2ubr1nh3m8x_firsti.jpg)
![22.5.1.1-[PendSV调度] 优先级最高的就绪任务 FreeRTOS任务切换 任务调度过程](http://i0.hdslb.com/bfs/storyff/n241223sa2ebgem2zyzlcy2mesifnc33_firsti.jpg)
![22.5.1.2-[带时间片的抢占式调度] FreeRTOS时间片调度 FreeRTOS实战项目 FreeRTOS原理分析](http://i0.hdslb.com/bfs/storyff/n241223sa1sv8002t9ebpp3mclfbcewi_firsti.jpg)
![22.5.1.3-[基于时间片的抢占式任务调度动画演示] FreeRTOS调度算法 FreeRTOS实战项目 FreeRTOS入门教程 FreeRTOS移植](http://i2.hdslb.com/bfs/storyff/n241223sanlv8fvkieb72b39zvsjncz7_firsti.jpg)
![22.5.2-[多任务创建和调度] FreeRTOS调度算法 抢占式任务调度](http://i1.hdslb.com/bfs/storyff/n241223sae9z0tlc2b1w418wqno9u1a7_firsti.jpg)
![22.6.0-[实现裸机的功能]-通过裸机 FreeRTOS项目实战 智能车](http://i2.hdslb.com/bfs/storyff/n241223sa31mmwyuvz2hzq1515h700rs_firsti.jpg)
![22.6.1-[实际测试几个功能是否正常] 测试FreeRTOS实战项目代码 FreeRTOS项目](http://i0.hdslb.com/bfs/storyff/n241223sa2w8ua8ttt9rrk2u2tnulfll_firsti.jpg)
![23.1.0-[消息队列和全局变量对比] FreeRTOS消息队列 任务之间通信和同步](http://i2.hdslb.com/bfs/storyff/n241223sa3k66qbkf8qazb11u9i0na4t_firsti.jpg)
![23.1.1-[消息队列的概念和函数] 消息队列如何完成任务之间通信 FreeRTOS原理讲解 任务之间通信讲解](http://i2.hdslb.com/bfs/storyff/n241223sa3l9q6g7vedrrn3droonqgi5_firsti.jpg)
![23.1.2-[通信同步过程分析] 消息队列同步过程分析 消息队列完成任务同步和通信](http://i0.hdslb.com/bfs/storyff/n241223sa1l1s7ba7dl1p71c3n2rka9o_firsti.jpg)
![23.1.3-[消息队列编程测试] FreeRTOS实战编程 消息队列实战任务通信](http://i1.hdslb.com/bfs/storyff/n241223sa1ojnev6fuaqn3hsr0js3zma_firsti.jpg)
![23.2.1-[编写MPU6050初始化] 增加MPU6050读取和初始化次数限制](http://i1.hdslb.com/bfs/storyff/n241223sa2160s49etnosw25u0ro59vk_firsti.jpg)
![23.2.2-[测试MPU6050和角度控制]](http://i1.hdslb.com/bfs/storyff/n241223sa3e5qsgyl1la8h34ag23xy2k_firsti.jpg)
![01_论文撰写和毕业设计教程说明[论文 毕设指导教程]](http://i1.hdslb.com/bfs/storyff/n250330tx2vw86jyfeextt1xtflh74sb_firsti.jpg)
![02_通用形毕设_选择导师和毕设任务书[论文 毕设指导教程]](http://i1.hdslb.com/bfs/storyff/n250330tx3n278bxq9ay4i19jy5jq918_firsti.jpg)
![03_通用毕设_开题报告 中期报告 毕业论文撰写 毕设答辩[论文 毕设指导教程]](http://i0.hdslb.com/bfs/storyff/n250330tx11rm1z5bal6lnkh08uf76zb_firsti.jpg)
![04_智能车嵌入式类毕设毕业设计怎么做?[论文 毕设指导教程]](http://i1.hdslb.com/bfs/storyff/n250330tx1uk0vrbohw5fm244qwg3w2w_firsti.jpg)