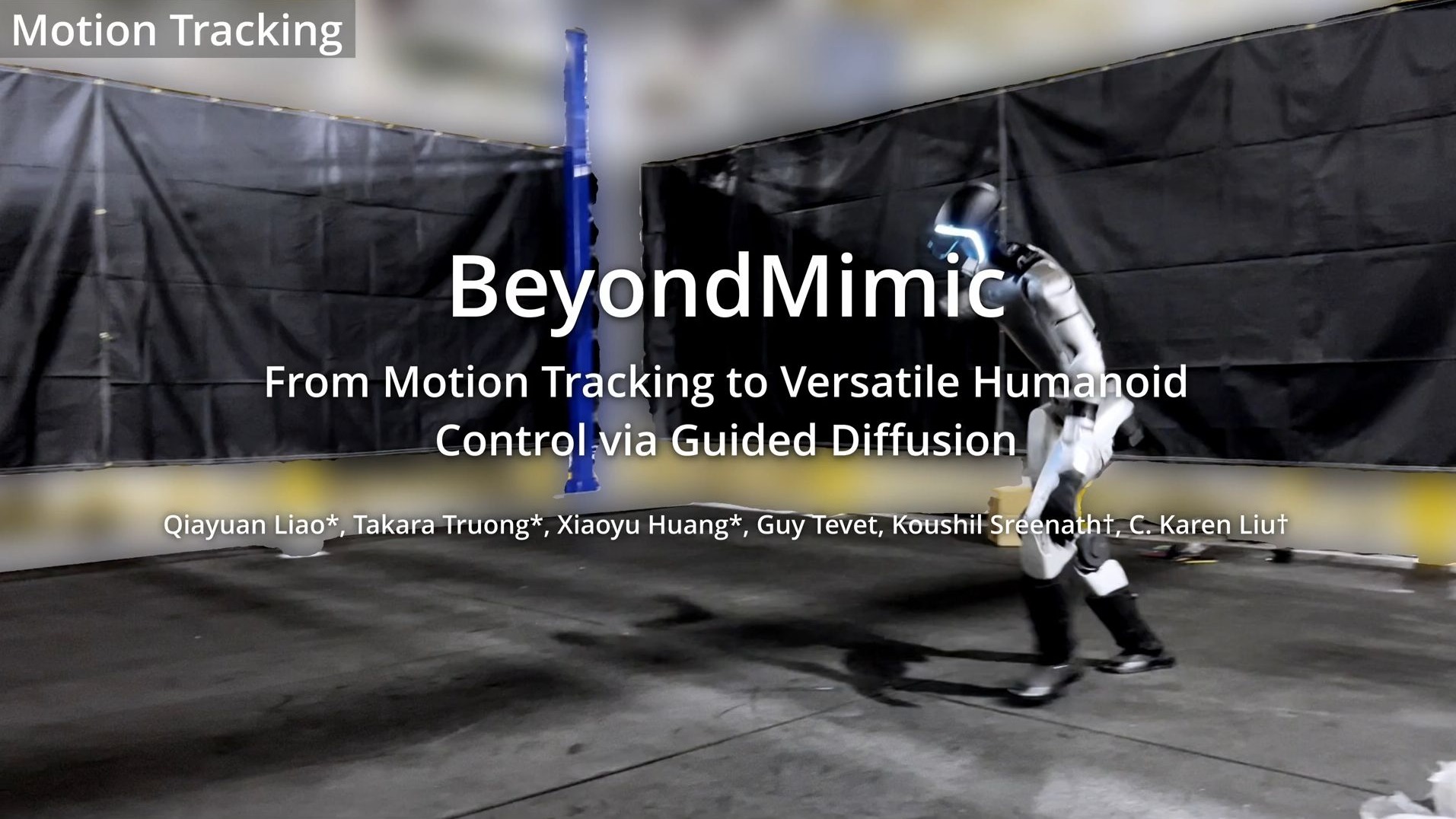
UP主: 封面: 简介:https://beyondmimic.github.io/如何让仿人机器人既能学会高质量的人体动作,又能零样本完成新任务?来自UC Berkeley Hybrid Robotics团队的 BeyondMimic 给出答案。该框架...
机器人科学与技术的视频 BeyondMimic:从动作跟踪到多任务仿人控制的扩散策略|2025 Hybrid Robotics【UC Berkeley】 除杂草机器人|2022【瑞士Ecorobotix】 注意力地图编码让机器人跨越复杂地形|2025 Science Robotics【ETH Zürich】 单驱管道爬行软体机器人|2022 【SoRo软体机器人】 智能多臂苹果采摘机器人|2024【Tevel&advanced.farm】 仿生蜜蜂BionicBee|2024【Festo】 机器人视觉超宽视场针孔复眼|2024|Science Robotics【香港科技大学】 谷歌5620亿参数多模态模型PaLM-E:机器人视觉语言通用模型|2023【Google】 餐饮机器人厨师|2023【Doosan Robotics】