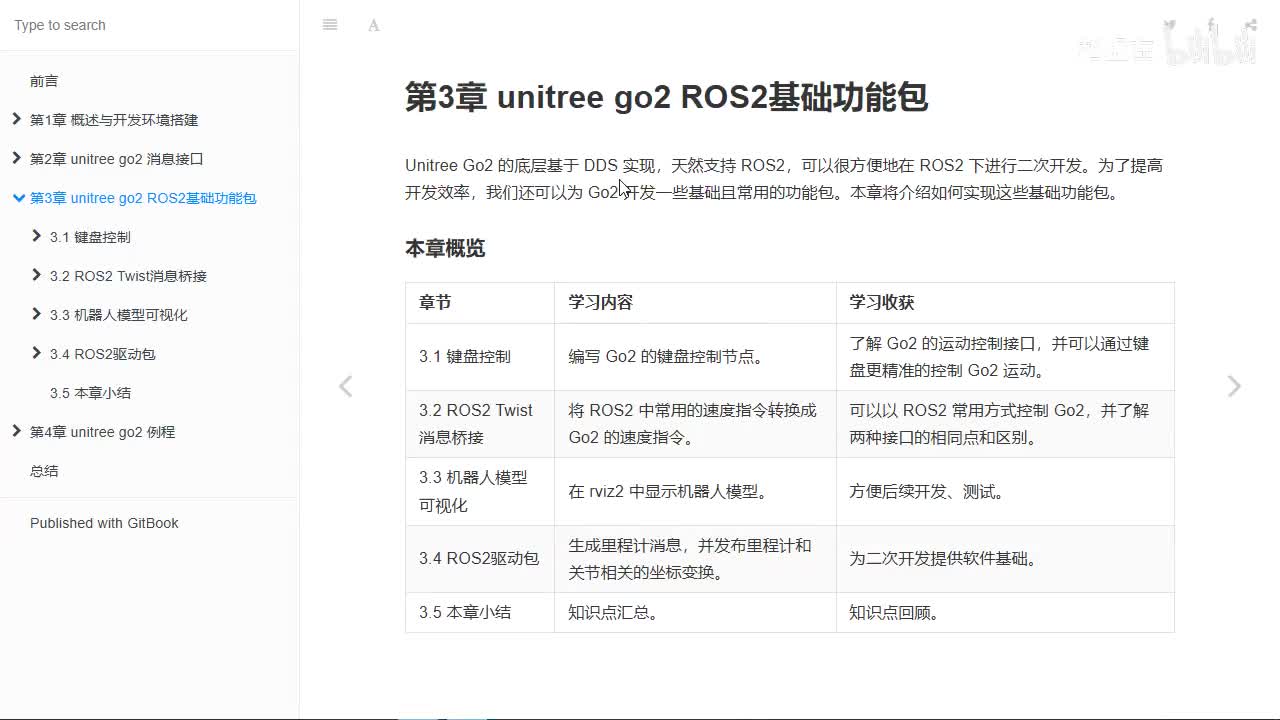
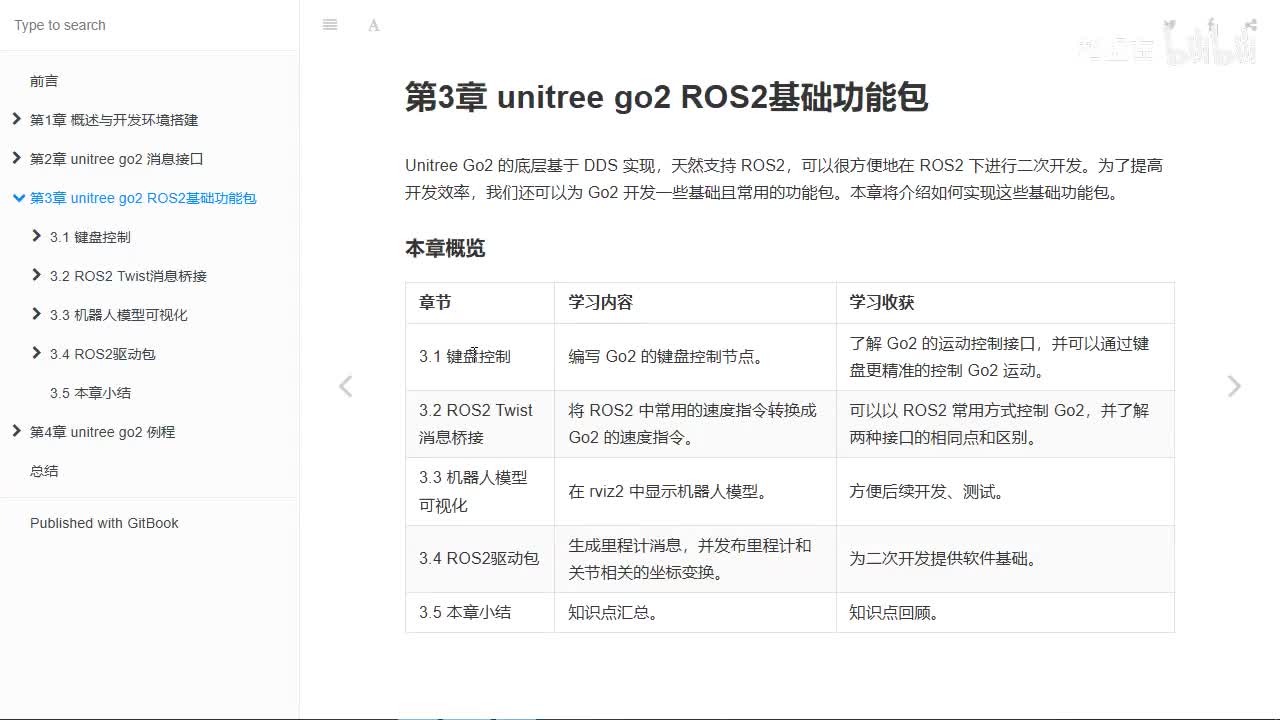
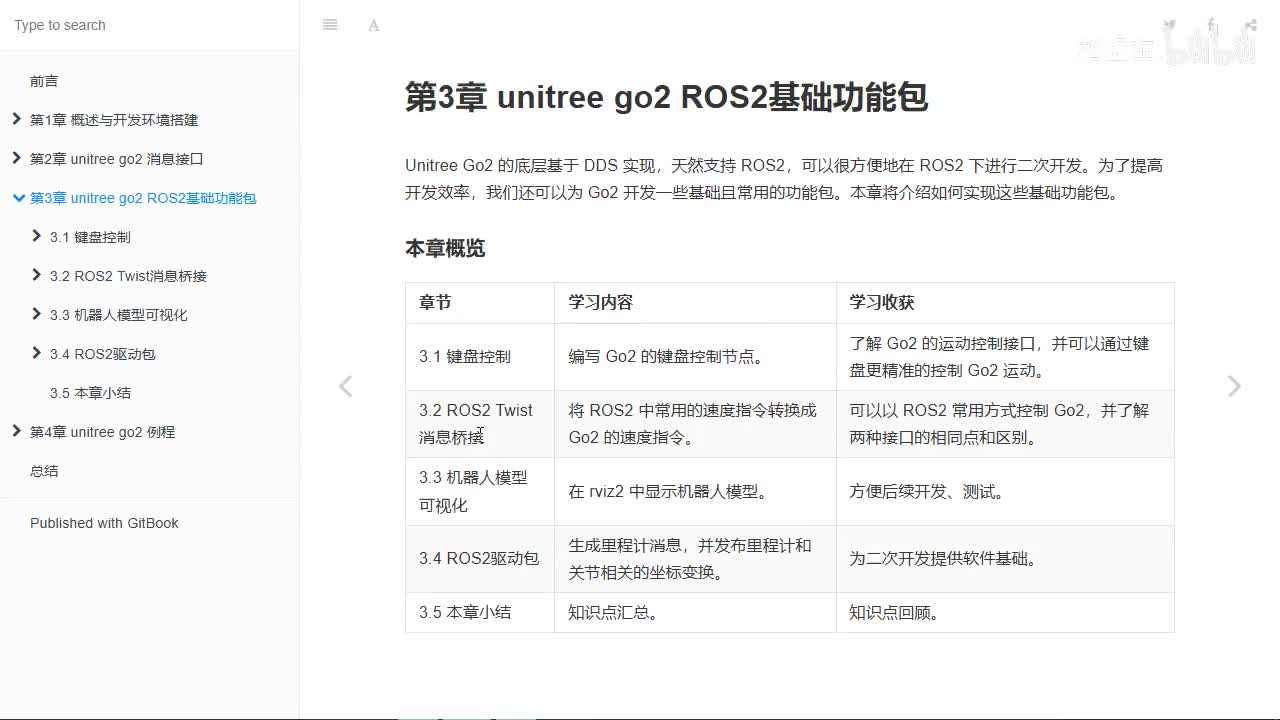
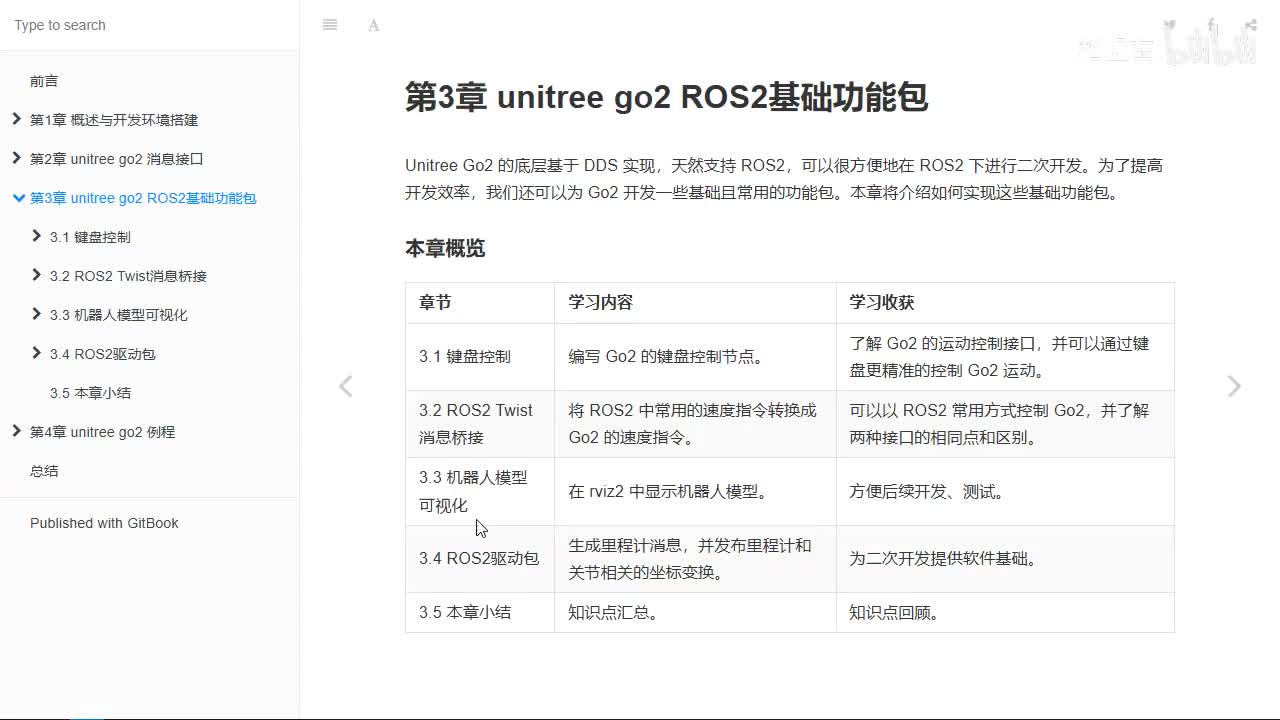
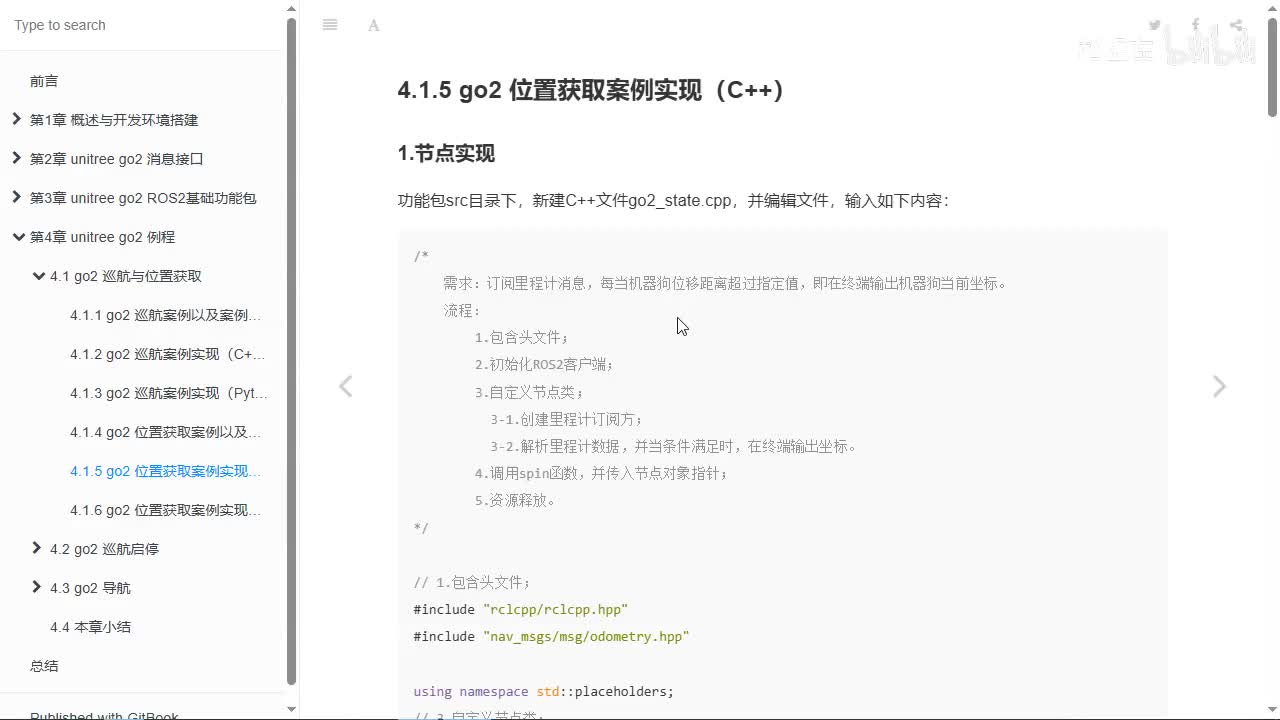
视频选集 宇树Go2开发指南0.0_前言 宇树Go2开发指南1.0_系统架构_简介 宇树Go2开发指南1.1.1_系统架构_详解 宇树Go2开发指南1.1.2_系统架构_开发接口说明 宇树Go2开发指南1.2.0_开发环境搭建_概述 宇树Go2开发指南1.2.1_开发环境搭建_准备 宇树Go2开发指南1.2.1_开发环境搭建_准备补充 宇树Go2开发指南1.2.2_开发环境搭建_安装unitree_ros2_01 宇树Go2开发指南1.2.2_开发环境搭建_安装unitree_ros2_02 宇树Go2开发指南1.2.2_开发环境搭建_安装unitree_ros2_03 宇树Go2开发指南1.2.3_开发环境搭建_网络配置 宇树Go2开发指南1.2.4_开发环境搭建_连接测试 宇树Go2开发指南1.2.5_开发环境搭建_内置例程 宇树Go2开发指南1.2.6_开发环境搭建_开发工具建议 宇树Go2开发指南1.3.1_快速体验_01需求简介 宇树Go2开发指南1.3.1_快速体验_02需求分析 宇树Go2开发指南1.3.2_快速体验_rclcpp实现01_简介 宇树Go2开发指南1.3.2_快速体验_rclcpp实现02_框架搭建 宇树Go2开发指南1.3.2_快速体验_rclcpp实现03_发布并执行 宇树Go2开发指南1.3.3_快速体验_rclpy实现01_简介与框架搭建 宇树Go2开发指南1.3.3_快速体验_rclpy实现02_代码编写以及执行 宇树Go2开发指南1.4.0_本章小结 宇树Go2开发指南2.0_消息接口_简介 宇树Go2开发指南2.1.0_状态获取_简介 宇树Go2开发指南2.1.1_高层状态获取1_话题与接口类型 宇树Go2开发指南2.1.1_高层状态获取2_接口数据格式 宇树Go2开发指南2.1.1_高层状态获取3_内置例程 宇树Go2开发指南2.1.2_低层状态获取1_话题与接口类型 宇树Go2开发指南2.1.2_低层状态获取2_接口数据格式 宇树Go2开发指南2.1.2_低层状态获取3_内置例程 宇树Go2开发指南2.1.3_遥控状态获取1_话题与接口类型 宇树Go2开发指南2.1.3_遥控状态获取2_接口数据格式 宇树Go2开发指南2.1.3_遥控状态获取2_接口数据格式演示 宇树Go2开发指南2.1.3_遥控状态获取3_内置例程 宇树Go2开发指南2.2.1_运动控制1_话题与接口类型 宇树Go2开发指南2.2.1_运动控制2_接口数据格式 宇树Go2开发指南2.2.1_运动控制3_内置例程 宇树Go2开发指南2.2.2_电机控制1_话题与接口类型 宇树Go2开发指南2.2.2_电机控制2_接口数据格式 宇树Go2开发指南2.2.2_电机控制3_内置例程01_准备 宇树Go2开发指南2.2.2_电机控制3_内置例程02_执行 宇树Go2开发指南2.2.2_电机控制3_内置例程03_恢复 宇树Go2开发指南2.3.0_本章小结 宇树Go2开发指南3.0_基础功能包前言0_简介 宇树Go2开发指南3.0_基础功能包前言1_键盘控制演示 宇树Go2开发指南3.0_基础功能包前言2_消息桥接演示 宇树Go2开发指南3.0_基础功能包前言3_机器人模型可视化 宇树Go2开发指南3.0_基础功能包前言4_驱动包 宇树Go2开发指南3.1.1_键盘控制_功能以及功能分析 宇树Go2开发指南3.1.2_键盘控制实现00_示例代码解释 宇树Go2开发指南3.1.2_键盘控制实现01_需求以及流程简介 宇树Go2开发指南3.1.2_键盘控制实现02_读取键盘录入 宇树Go2开发指南3.1.2_键盘控制实现03_节点对象创建 宇树Go2开发指南3.1.2_键盘控制实现04_简单按键映射 宇树Go2开发指南3.1.2_键盘控制实现05_测试 宇树Go2开发指南3.1.2_键盘控制实现06_按键映射分析 宇树Go2开发指南3.1.2_键盘控制实现07_运动模式切换与退出 宇树Go2开发指南3.1.2_键盘控制实现08_运动控制分析 宇树Go2开发指南3.1.2_键盘控制实现09_运动控制实现 宇树Go2开发指南3.1.2_键盘控制实现10_调速实现 宇树Go2开发指南3.1.2_键盘控制实现11_优化 宇树Go2开发指南3.1.2_键盘控制实现12_小结 宇树Go2开发指南3.2.0_twist桥接包_简介 宇树Go2开发指南3.2.1_twist桥接包_功能简介以及实现分析 宇树Go2开发指南3.2.2_twist桥接包C++实现_01简介 宇树Go2开发指南3.2.2_twist桥接包C++实现_02代码框架搭建 宇树Go2开发指南3.2.2_twist桥接包C++实现_03桥接实现 宇树Go2开发指南3.2.3_twist桥接包Python实现_01代码框架搭建 宇树Go2开发指南3.2.3_twist桥接包Python实现_02桥接实现 宇树Go2开发指南3.3.0_机器人模型可视化简介 宇树Go2开发指南3.3.1_机器人模型可视化_功能以及实现分析 宇树Go2开发指南3.3.2_机器人模型可视化_实现01框架搭建 宇树Go2开发指南3.3.2_机器人模型可视化_实现02添加robot_state_publisher 宇树Go2开发指南3.3.2_机器人模型可视化_实现03添加joint_state_publisher并修复BUG 宇树Go2开发指南3.3.2_机器人模型可视化_实现04joint_state_publisher优化 宇树Go2开发指南3.3.2_机器人模型可视化_实现05robot_state_publisher优化 宇树Go2开发指南3.4.0_驱动包简介 宇树Go2开发指南3.4.1_驱动包_功能简介以及实现分析 宇树Go2开发指南3.4.2_驱动包(C++)_01流程简介 宇树Go2开发指南3.4.2_驱动包(C++)_02框架搭建 宇树Go2开发指南3.4.2_驱动包(C++)_03可视化上 宇树Go2开发指南3.4.2_驱动包(C++)_04可视化中 宇树Go2开发指南3.4.2_驱动包(C++)_05可视化下 宇树Go2开发指南3.4.2_驱动包(C++)_06速度桥接 宇树Go2开发指南3.4.2_驱动包(C++)_07驱动节点分析 宇树Go2开发指南3.4.2_驱动包(C++)_08里程计发布01 宇树Go2开发指南3.4.2_驱动包(C++)_09里程计发布02 宇树Go2开发指南3.4.2_驱动包(C++)_10里程计发布03 宇树Go2开发指南3.4.2_驱动包(C++)_11TF变换01 宇树Go2开发指南3.4.2_驱动包(C++)_12TF变换02 宇树Go2开发指南3.4.2_驱动包(C++)_13TF变换03 宇树Go2开发指南3.4.2_驱动包(C++)_14TF变换04 宇树Go2开发指南3.4.2_驱动包(C++)_15关节状态发布01 宇树Go2开发指南3.4.2_驱动包(C++)_15关节状态发布02 宇树Go2开发指南3.4.2_驱动包(C++)_16关节状态发布03 宇树Go2开发指南3.4.2_驱动包(C++)_17参数设置 宇树Go2开发指南3.4.2_驱动包(C++)_18小结 宇树Go2开发指南3.4.3_驱动包(Python)_01流程简介以及框架搭建 宇树Go2开发指南3.4.3_驱动包(Python)_02launch文件实现 宇树Go2开发指南3.4.3_驱动包(Python)_03里程计发布01 宇树Go2开发指南3.4.3_驱动包(Python)_04里程计发布02 宇树Go2开发指南3.4.3_驱动包(Python)_05里程计坐标变换01 宇树Go2开发指南3.4.3_驱动包(Python)_06里程计坐标变换02 宇树Go2开发指南3.4.3_驱动包(Python)_07关节状态发布01 宇树Go2开发指南3.4.3_驱动包(Python)_08关节状态发布02 宇树Go2开发指南3.5_本章小结 宇树Go2开发指南4.0_通信例程_00简介 宇树Go2开发指南4.0_通信例程_01话题通信案例 宇树Go2开发指南4.0_通信例程_02服务通信案例 宇树Go2开发指南4.0_通信例程_03动作通信案例 宇树Go2开发指南4.1.1_go2巡航_案例分析 宇树Go2开发指南4.1.2_go2巡航(C++)_01框架搭建 宇树Go2开发指南4.1.2_go2巡航(C++)_02速度发布 宇树Go2开发指南4.1.2_go2巡航(C++)_03参数设置 宇树Go2开发指南4.1.3_go2巡航(Python)_01速度发布 宇树Go2开发指南4.1.3_go2巡航(Python)_02参数设置 宇树Go2开发指南4.1.4_go2位置获取_案例分析 宇树Go2开发指南4.1.5_go2位置获取(C++)_01流程简介 宇树Go2开发指南4.1.5_go2位置获取(C++)_02框架搭建 宇树Go2开发指南4.1.5_go2位置获取(C++)_03设置第一个记录点 宇树Go2开发指南4.1.5_go2位置获取(C++)_04主逻辑实现 宇树Go2开发指南4.1.5_go2位置获取(C++)_05测试以及优化 宇树Go2开发指南4.1.6_go2位置获取(Python)_01流程简介与框架搭建 宇树Go2开发指南4.1.6_go2位置获取(Python)_02主逻辑实现 宇树Go2开发指南4.1.6_go2位置获取(Python)_03测试以及优化 宇树Go2开发指南4.2.1_go2巡航启停_案例分析 宇树Go2开发指南4.2.2_go2巡航启停_接口定义 宇树Go2开发指南4.2.3_go2巡航启停(C++)_01流程简介 宇树Go2开发指南4.2.3_go2巡航启停(C++)_02框架搭建 宇树Go2开发指南4.2.3_go2巡航启停(C++)_03服务端简单实现 宇树Go2开发指南4.2.3_go2巡航启停(C++)_04服务端测试 宇树Go2开发指南4.2.3_go2巡航启停(C++)_05服务端响应 宇树Go2开发指南4.2.3_go2巡航启停(C++)_06服务端巡航逻辑 宇树Go2开发指南4.2.3_go2巡航启停(C++)_07服务端测试与优化 宇树Go2开发指南4.2.3_go2巡航启停(C++)_08客户端01 宇树Go2开发指南4.2.3_go2巡航启停(C++)_09客户端02 宇树Go2开发指南4.2.3_go2巡航启停(C++)_10客户端03 宇树Go2开发指南4.2.4_go2巡航启停(Python)_01流程简介 宇树Go2开发指南4.2.4_go2巡航启停(Python)_02框架搭建 宇树Go2开发指南4.2.4_go2巡航启停(Python)_03服务端简单实现 宇树Go2开发指南4.2.4_go2巡航启停(Python)_04服务端生成响应坐标 宇树Go2开发指南4.2.4_go2巡航启停(Python)_05服务端巡航启停 宇树Go2开发指南4.2.4_go2巡航启停(Python)_06服务端参数优化 宇树Go2开发指南4.2.4_go2巡航启停(Python)_07客户端01 宇树Go2开发指南4.2.4_go2巡航启停(Python)_08客户端02 宇树Go2开发指南4.2.4_go2巡航启停(Python)_09客户端03 宇树Go2开发指南4.2.4_go2巡航启停(Python)_04服务端生成响应坐标 宇树Go2开发指南4.2.4_go2巡航启停(Python)_05服务端巡航启停 宇树Go2开发指南4.2.4_go2巡航启停(Python)_06服务端参数优化 宇树Go2开发指南4.2.4_go2巡航启停(Python)_07客户端01 宇树Go2开发指南4.2.4_go2巡航启停(Python)_08客户端02 宇树Go2开发指南4.2.4_go2巡航启停(Python)_09客户端03 宇树Go2开发指南4.3.1_go2导航_案例分析 宇树Go2开发指南4.3.2_go2导航_接口定义 宇树Go2开发指南4.3.3_go2导航(C++)_01流程简介 宇树Go2开发指南4.3.3_go2导航(C++)_02框架搭建 宇树Go2开发指南4.3.3_go2导航(C++)_03服务端分析 宇树Go2开发指南4.3.3_go2导航(C++)_04服务端框架 宇树Go2开发指南4.3.3_go2导航(C++)_05里程计消息获取 宇树Go2开发指南4.3.3_go2导航(C++)_06参数服务创建 宇树Go2开发指南4.3.3_go2导航(C++)_07目标处理 宇树Go2开发指南4.3.3_go2导航(C++)_08取消请求 宇树Go2开发指南4.3.3_go2导航(C++)_09主逻辑实现 宇树Go2开发指南4.3.3_go2导航(C++)_10测试 宇树Go2开发指南4.3.3_go2导航(C++)_11优化 宇树Go2开发指南4.3.3_go2导航(C++)_12客户端框架 宇树Go2开发指南4.3.3_go2导航(C++)_13客户端服务连接 宇树Go2开发指南4.3.3_go2导航(C++)_14客户端发送请求 宇树Go2开发指南4.3.3_go2导航(C++)_15客户端函数声明 宇树Go2开发指南4.3.3_go2导航(C++)_16客户端处理响应 宇树Go2开发指南4.3.3_go2导航(C++)_17客户端测试以及BUG修复 宇树Go2开发指南4.3.4_go2导航(Python)_01流程简介 宇树Go2开发指南4.3.4_go2导航(Python)_02框架搭建 宇树Go2开发指南4.3.4_go2导航(Python)_03ActionServer_01 宇树Go2开发指南4.3.4_go2导航(Python)_04ActionServer_02 宇树Go2开发指南4.3.4_go2导航(Python)_05ActionServer_03 宇树Go2开发指南4.3.4_go2导航(Python)_06ActionServer_04 宇树Go2开发指南4.3.4_go2导航(Python)_07ActionServer_05 宇树Go2开发指南4.3.4_go2导航(Python)_08ActionServer_06 宇树Go2开发指南4.3.4_go2导航(Python)_09ActionServer_07 宇树Go2开发指南4.3.4_go2导航(Python)_10ActionClient_01 宇树Go2开发指南4.3.4_go2导航(Python)_11ActionClient_02 宇树Go2开发指南4.3.4_go2导航(Python)_12ActionClient_03 宇树Go2开发指南4.3.4_go2导航(Python)_13ActionClient_04 宇树Go2开发指南4.3.4_go2导航(Python)_14ActionClient_05 宇树Go2开发指南4.4.0_本章小结 宇树Go2开发指南5.0_总结