UP主: 封面: 简介:PCL完全是一个模块化的现代C++模板库,基于Boost、Eigen、FLANN、VTK、CUDA、OpenNI、Qhull,实现点云相关的获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重...
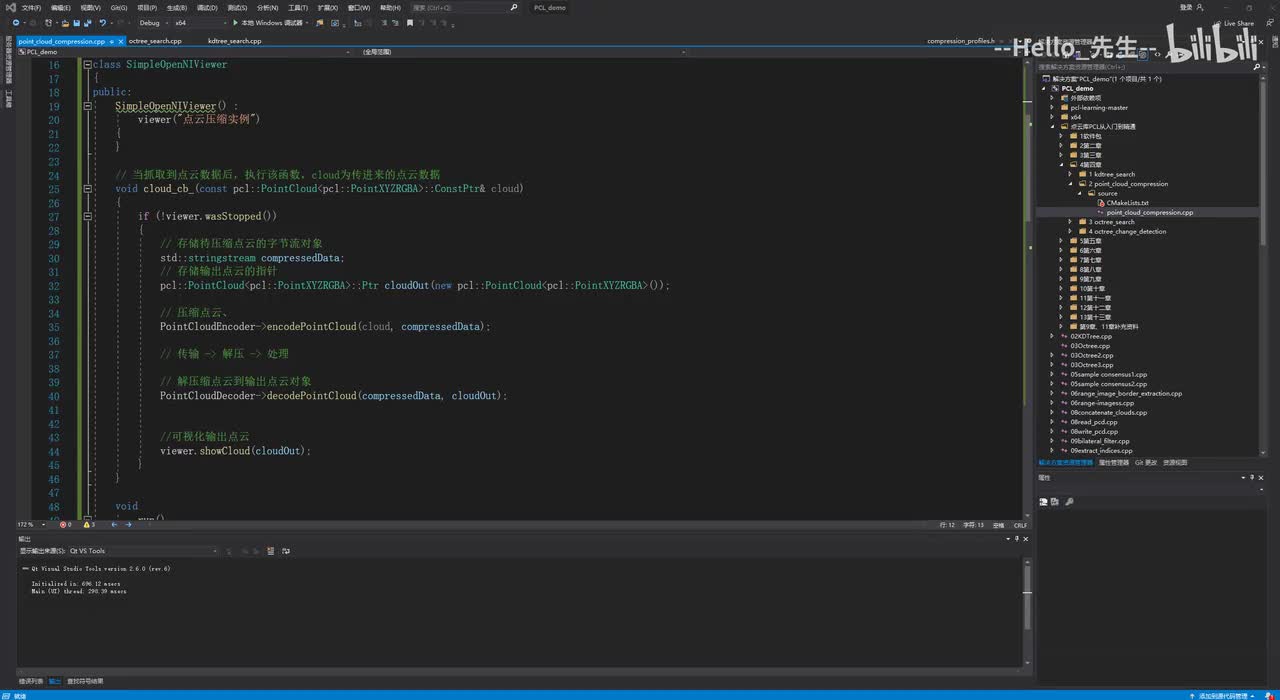
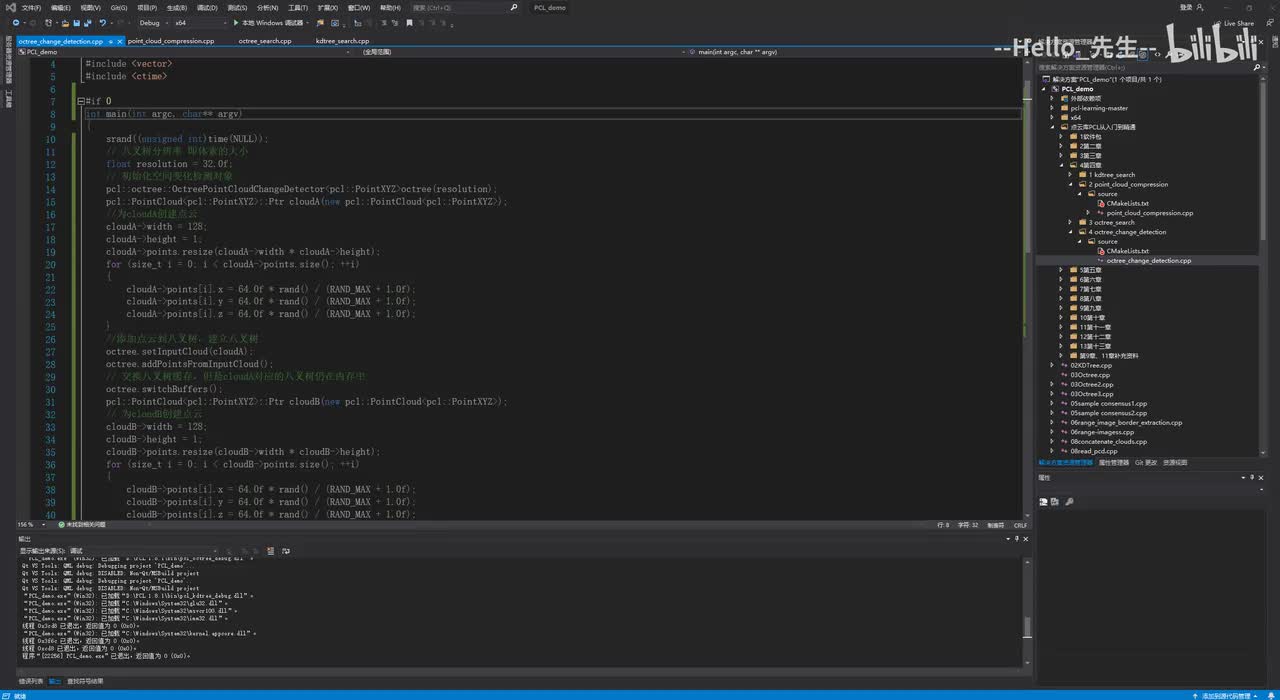
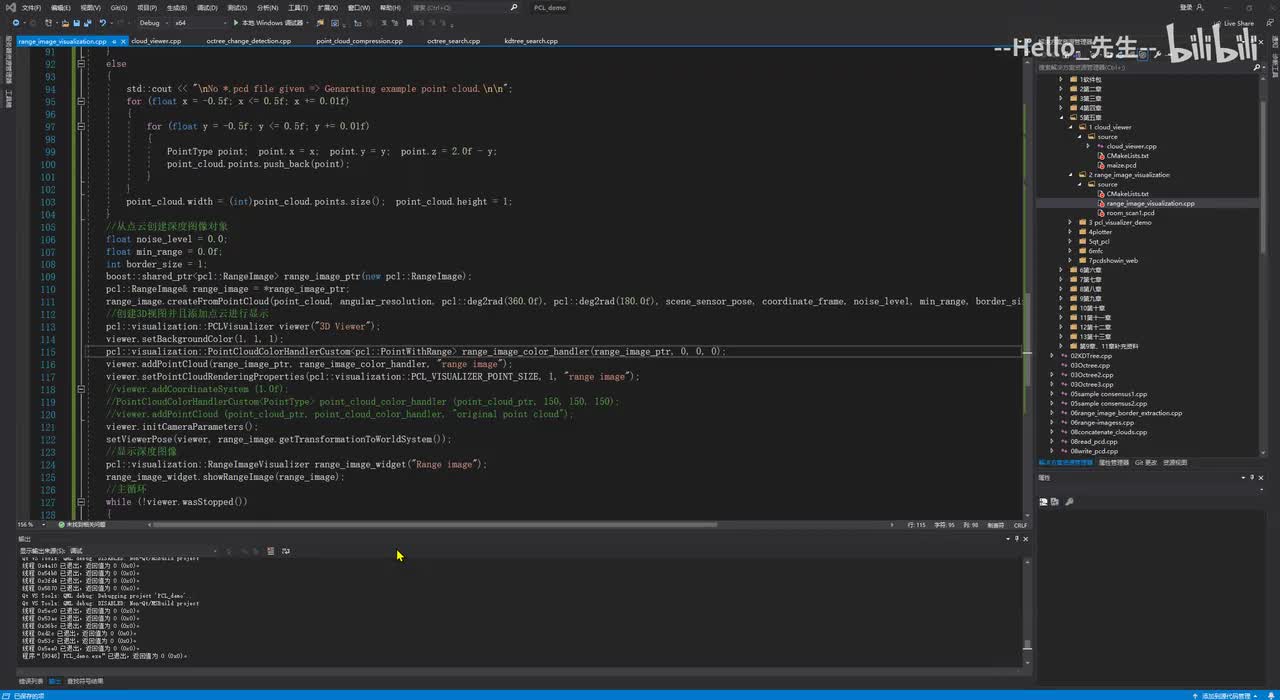
视频选集 1、PCD文件头 2、kd_tree 3、octree 4、点云压缩-介绍 5、点云压缩-高级参数设置 6、无序点云空间变化检测 7、点云可视化 8、可视化深度图像 9、PCLVisualizer可视化类 10、PCLPlotter可视化特征直方图 11、直通滤波器 12、VoxelGrid滤波器对点云下采样 13、StatisticalOutlierRemoval滤波器移除离群点 14、参数化模型投影 15、从点云中提取子集 16、使用ConditionalRemoval或RadiusOutlierRemoval移除离群点-1 17、使用ConditionalRemoval或RadiusOutlierRemoval移除离群点-2 18、CropHull任意多边形内部的点云提取 19、从点云创建深度图像 20、从点云创建深度图像(补充1) 21、从点云创建深度图像(补充2) 22、从深度图像中提取边界 23、点云到深度图像变换与曲面重建 24、从距离图像中提取NARF关键点 25、SIFT关键点提取 26、Harris关键点提取 27、基于对应点分类的对象识别-1