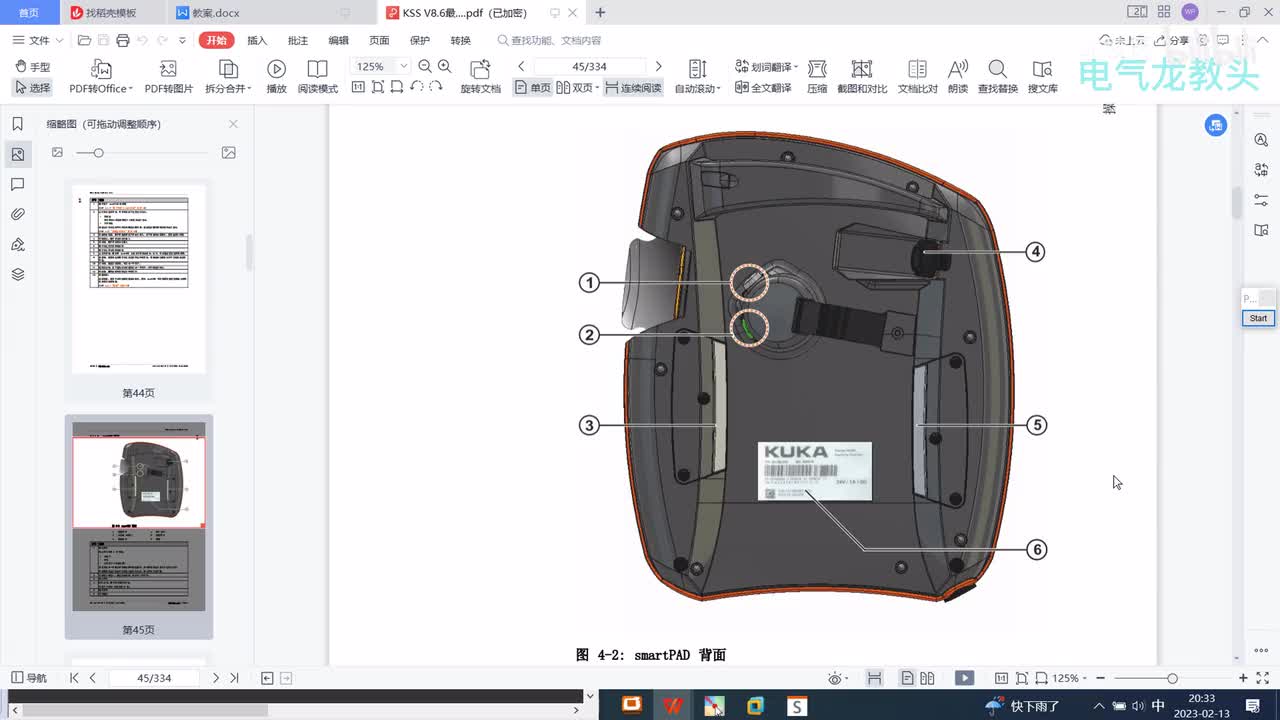
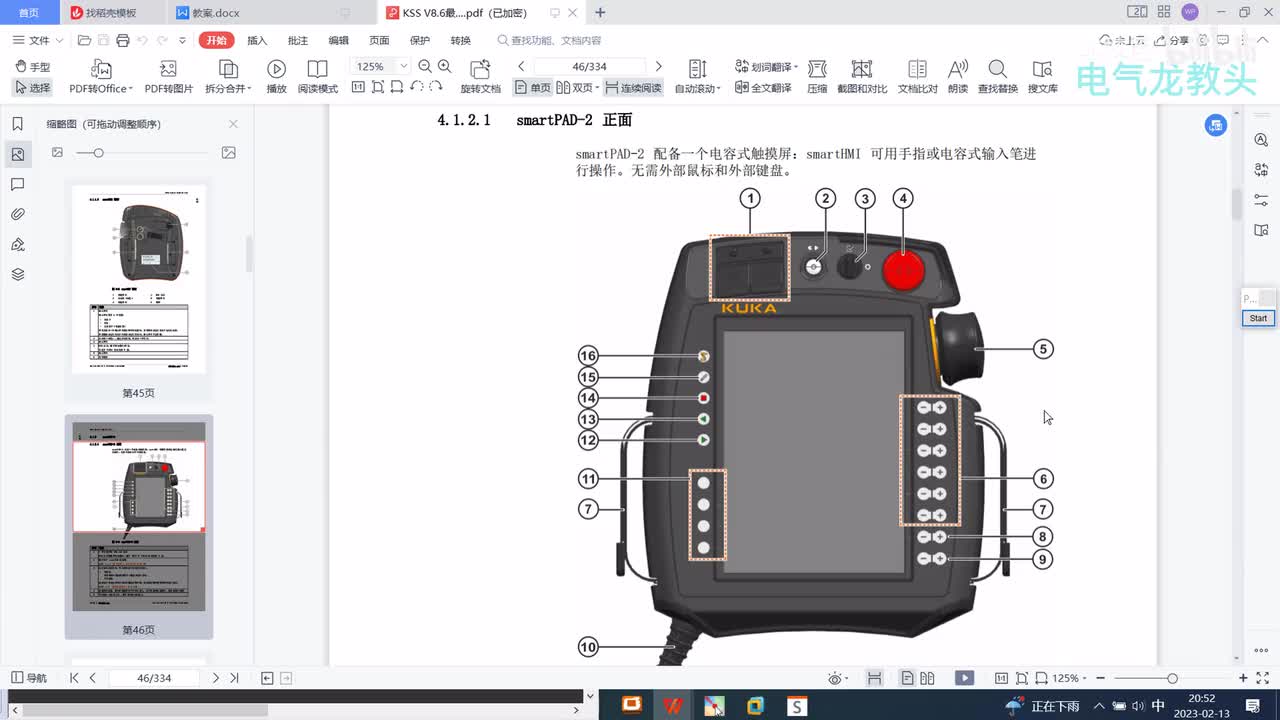
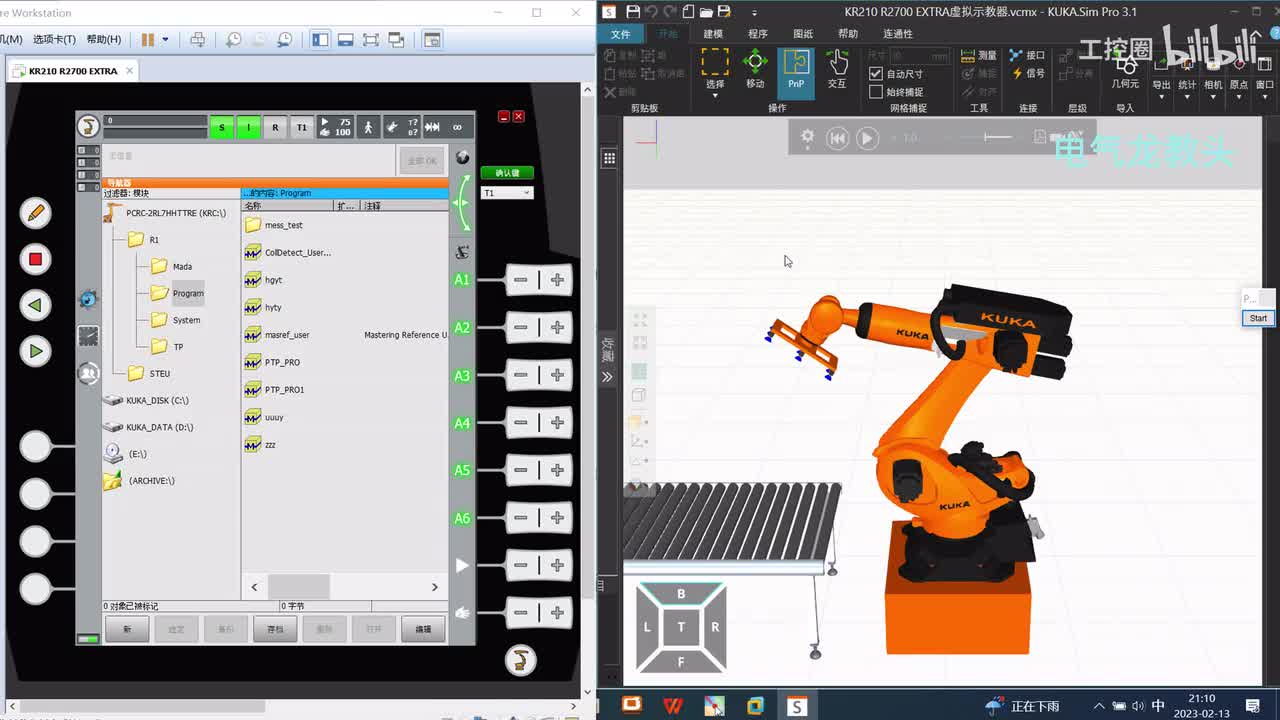
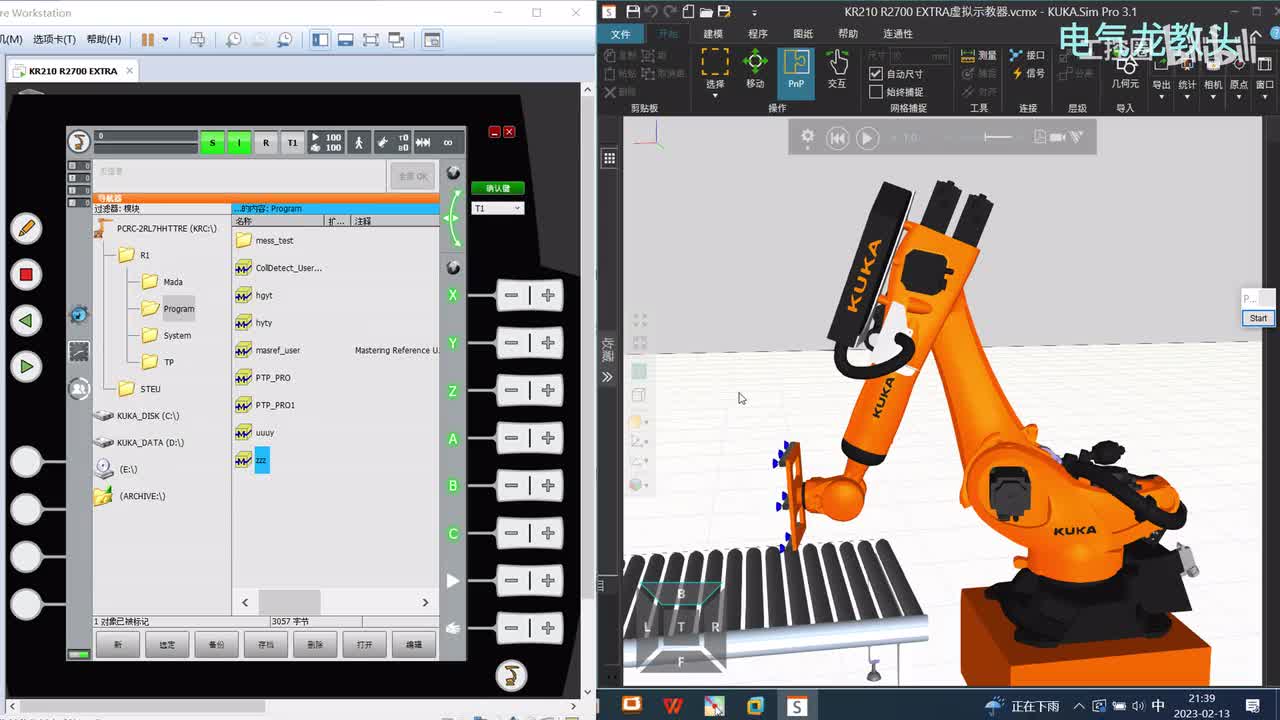
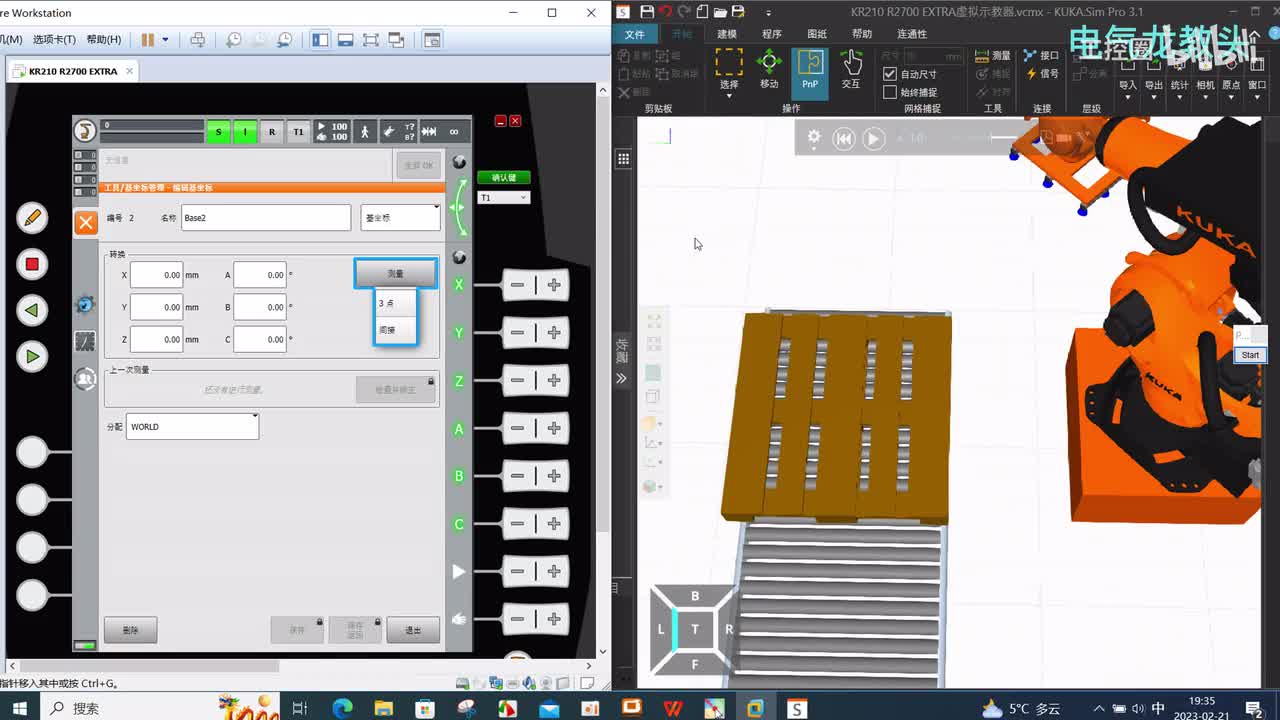
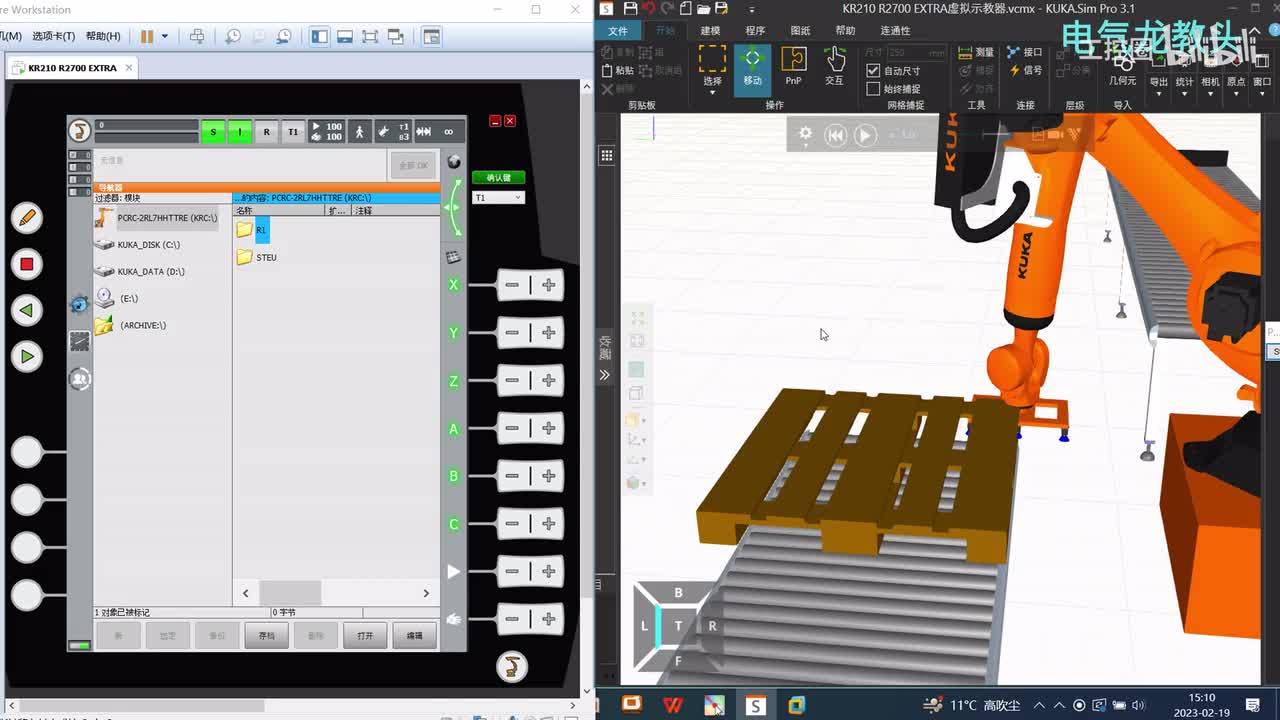
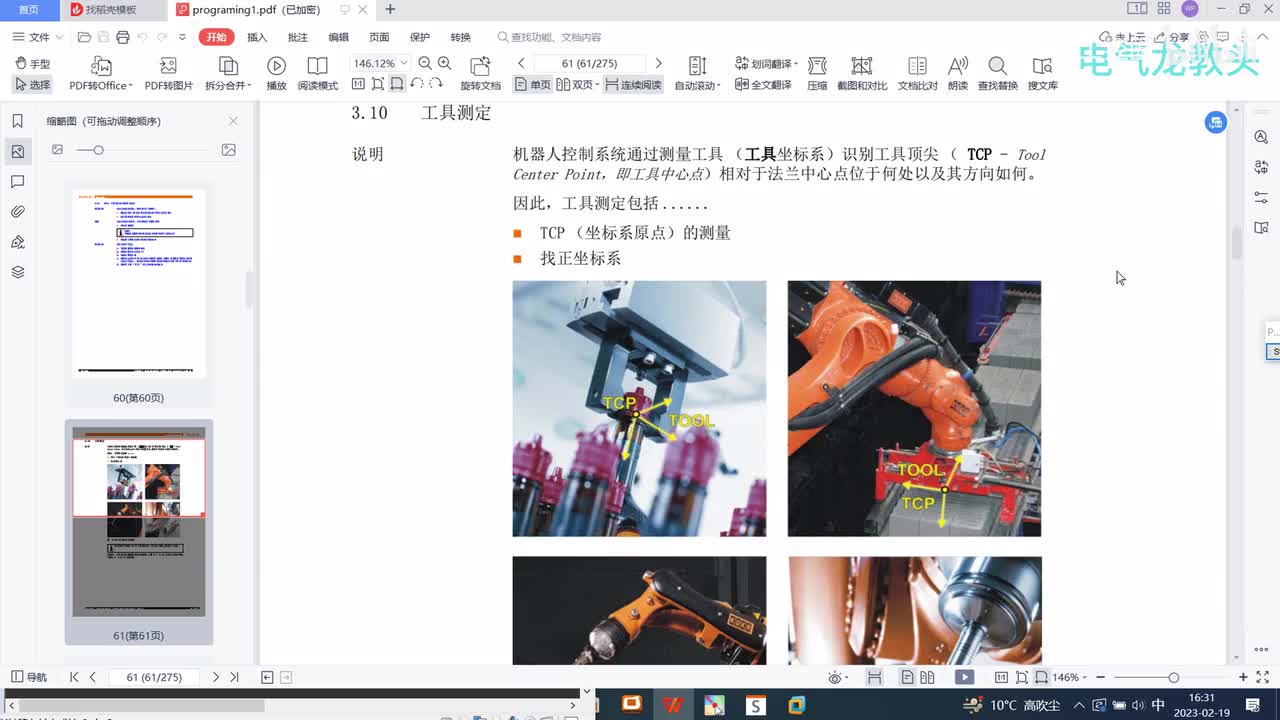
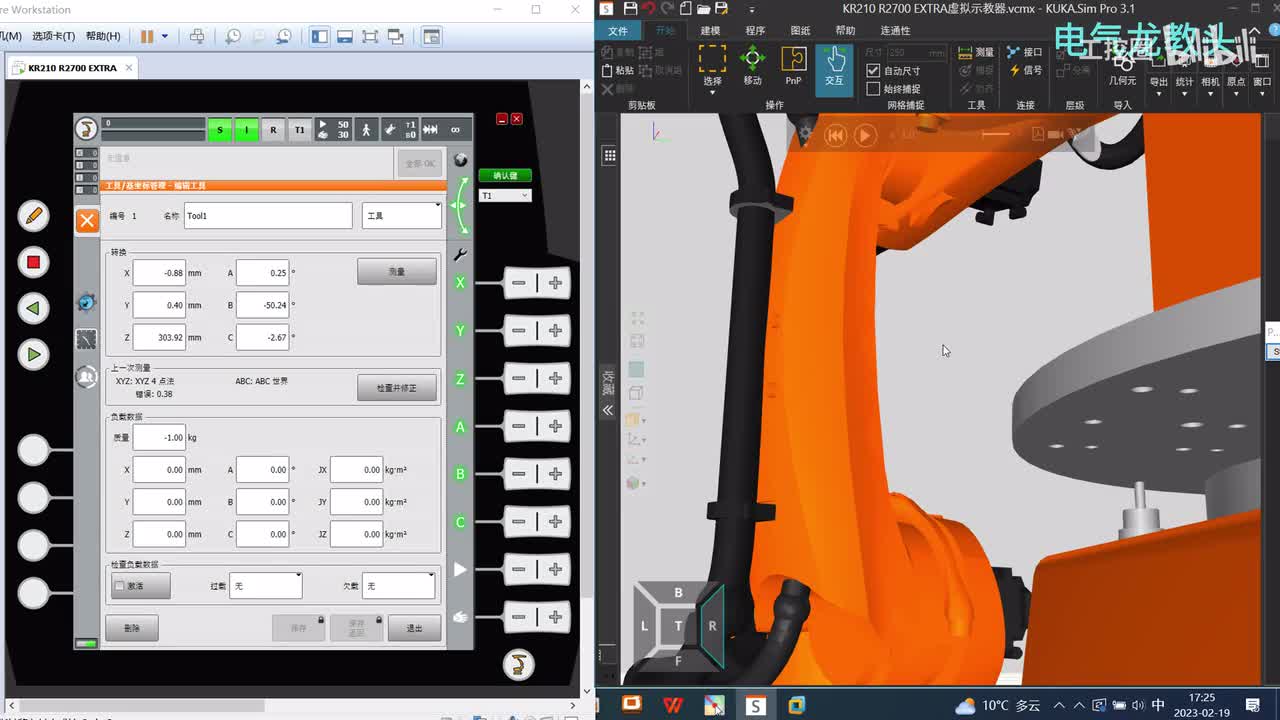
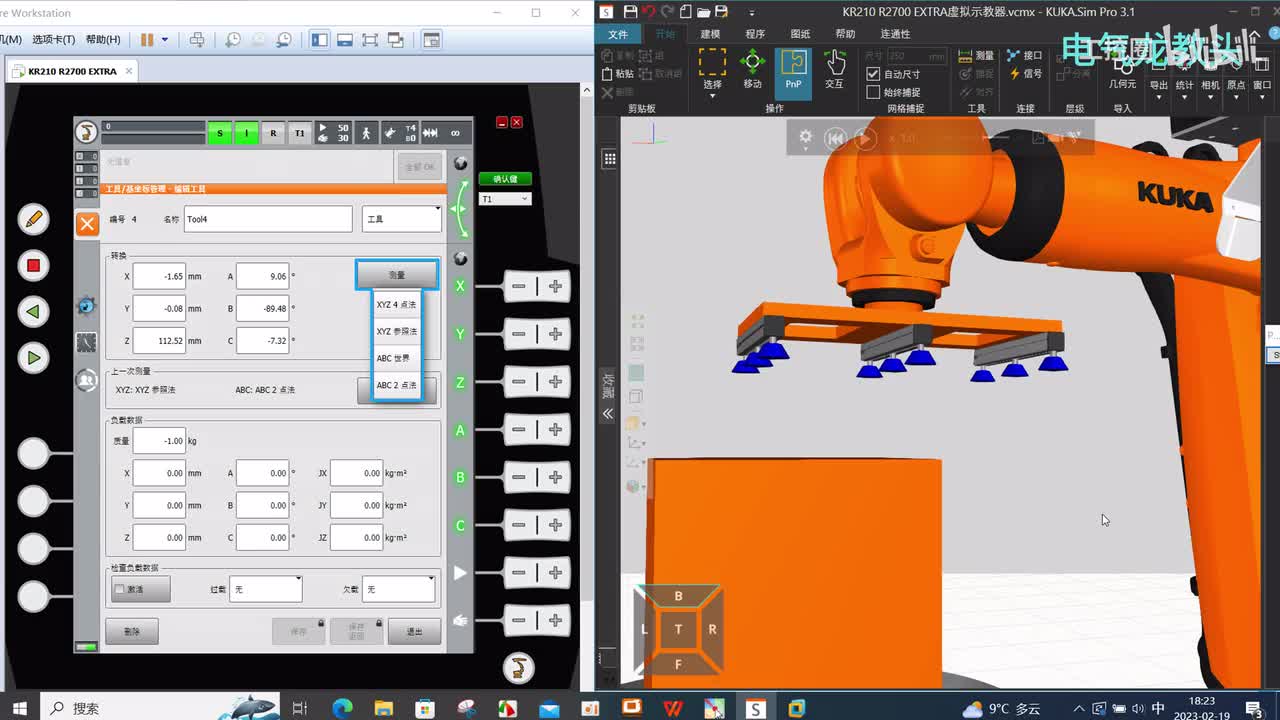
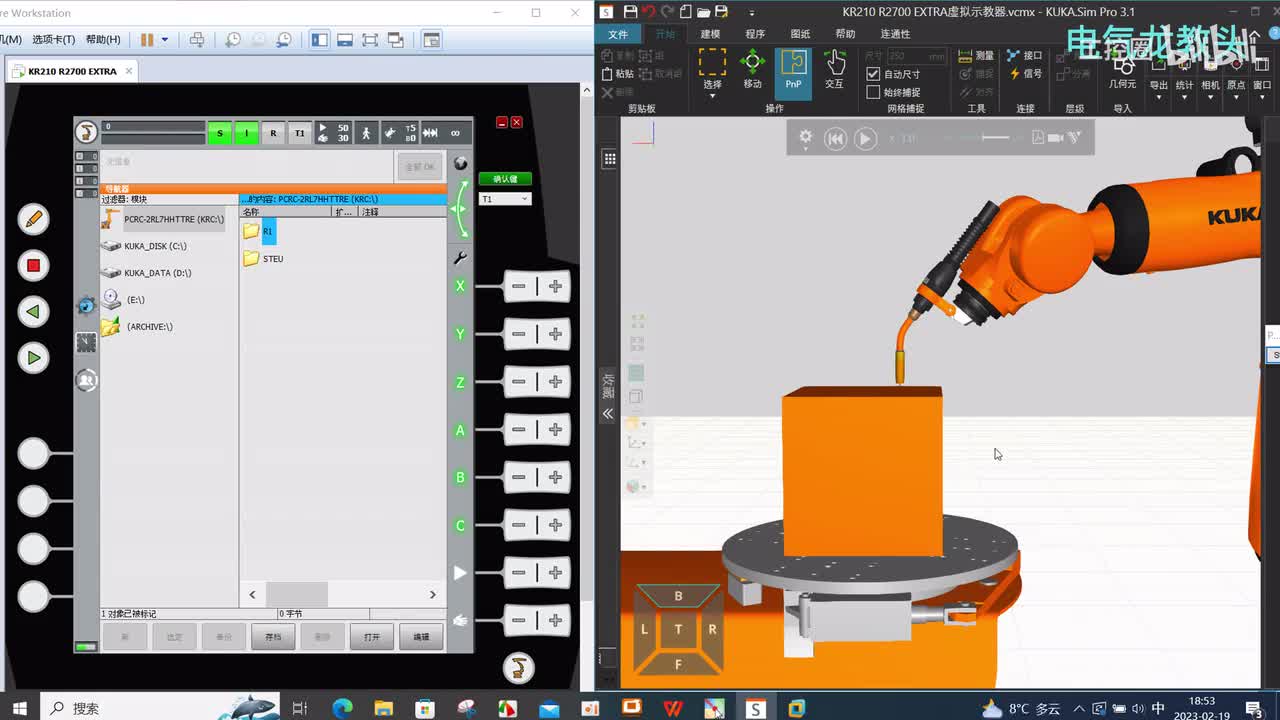
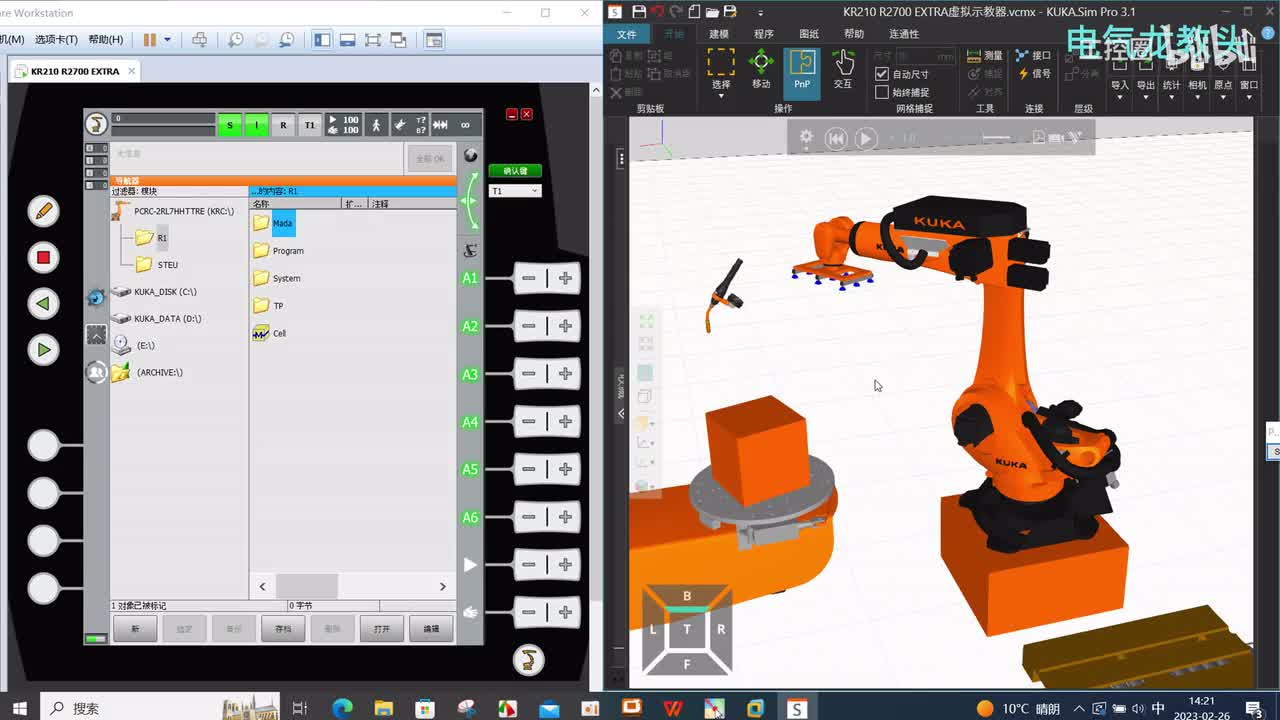
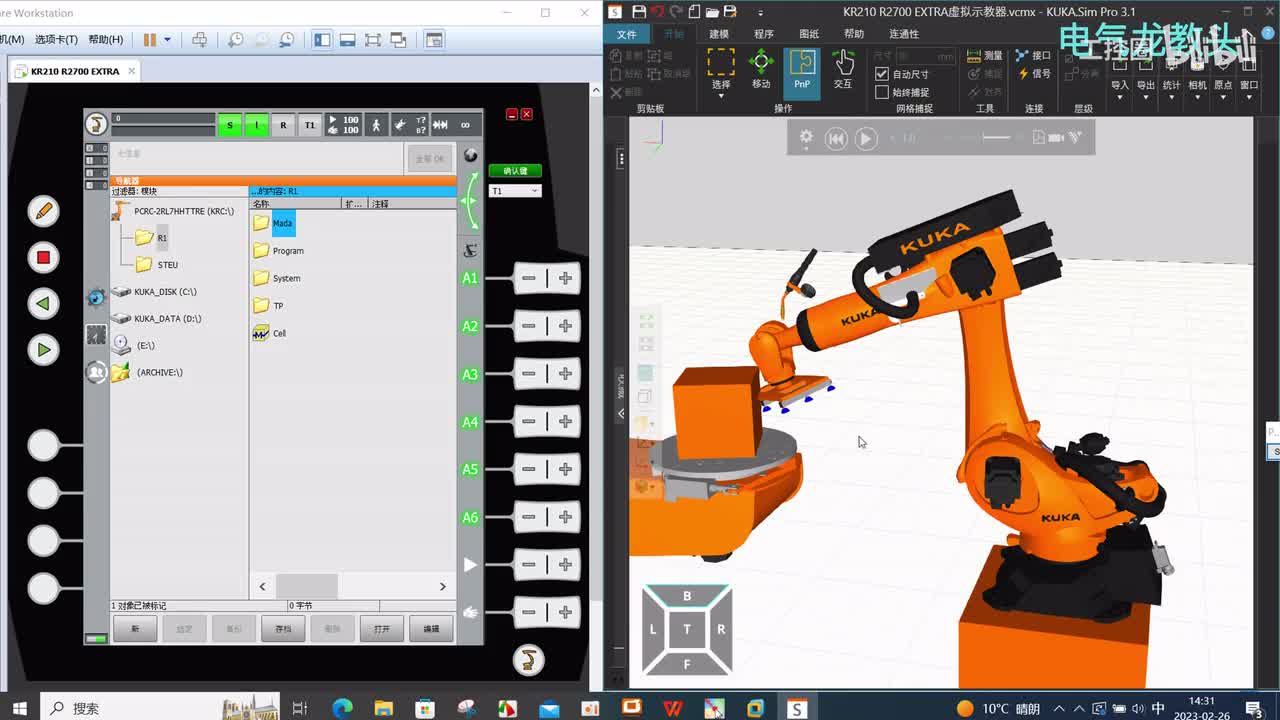
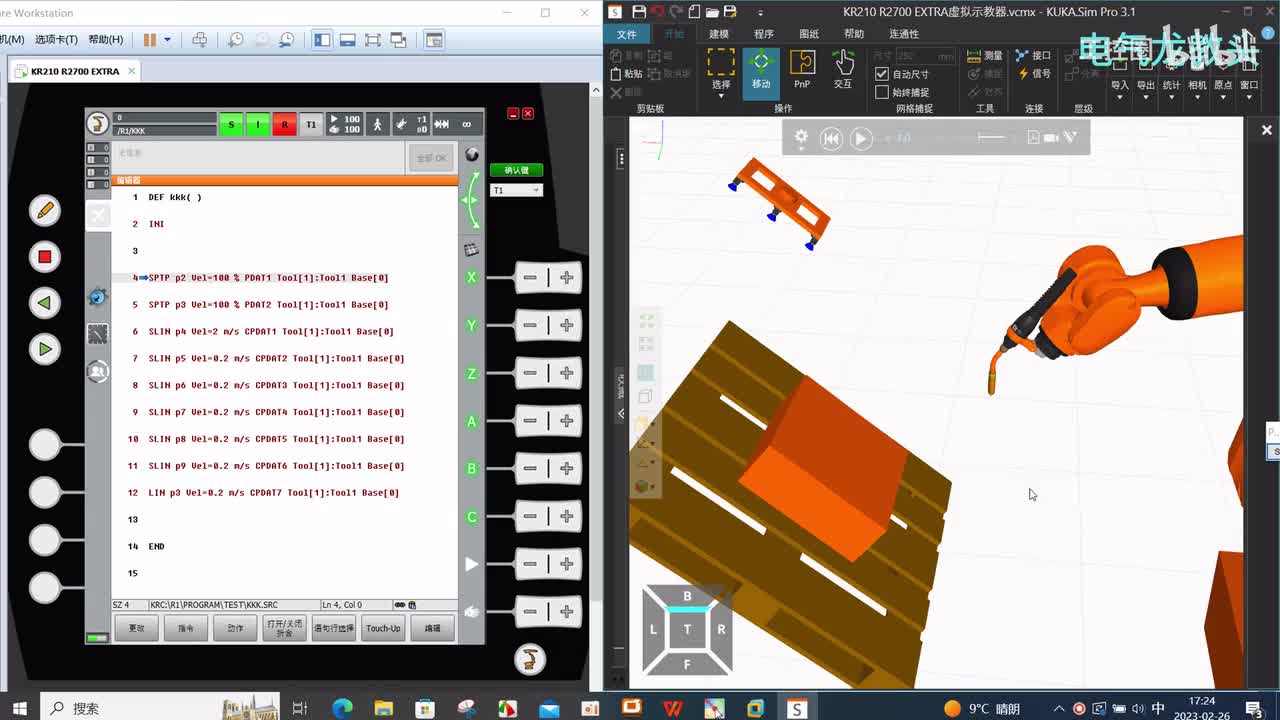
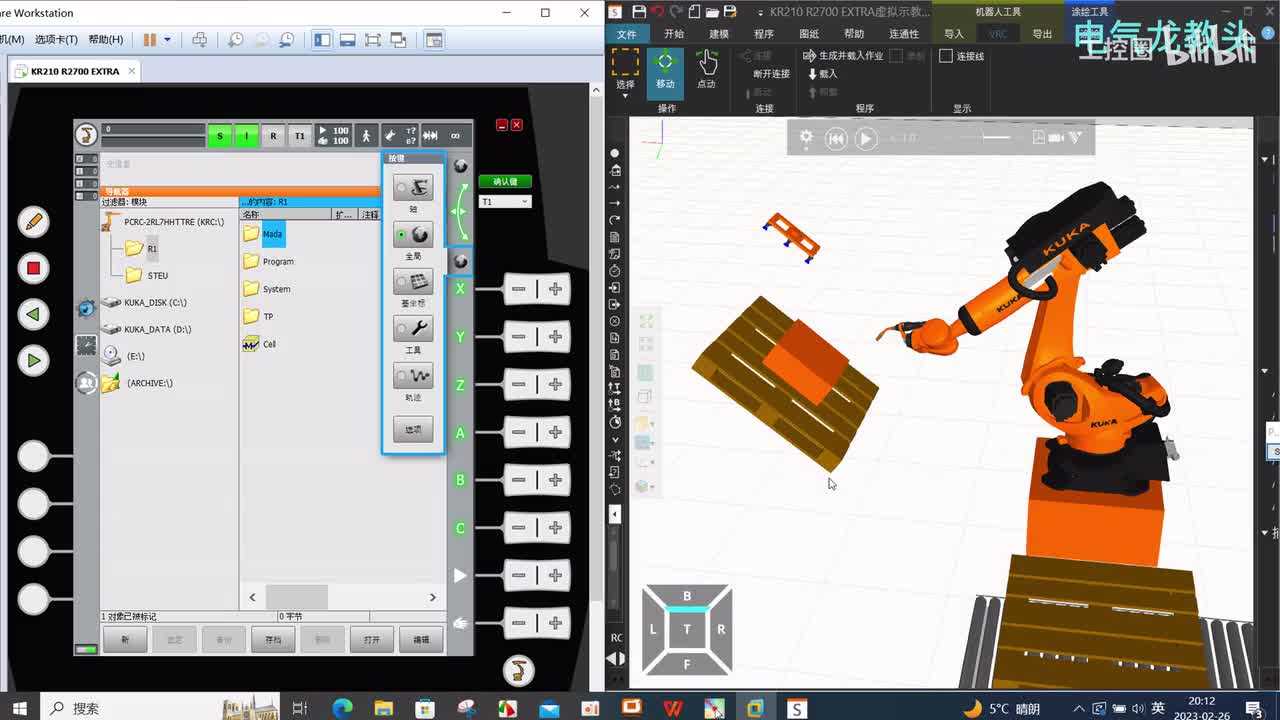
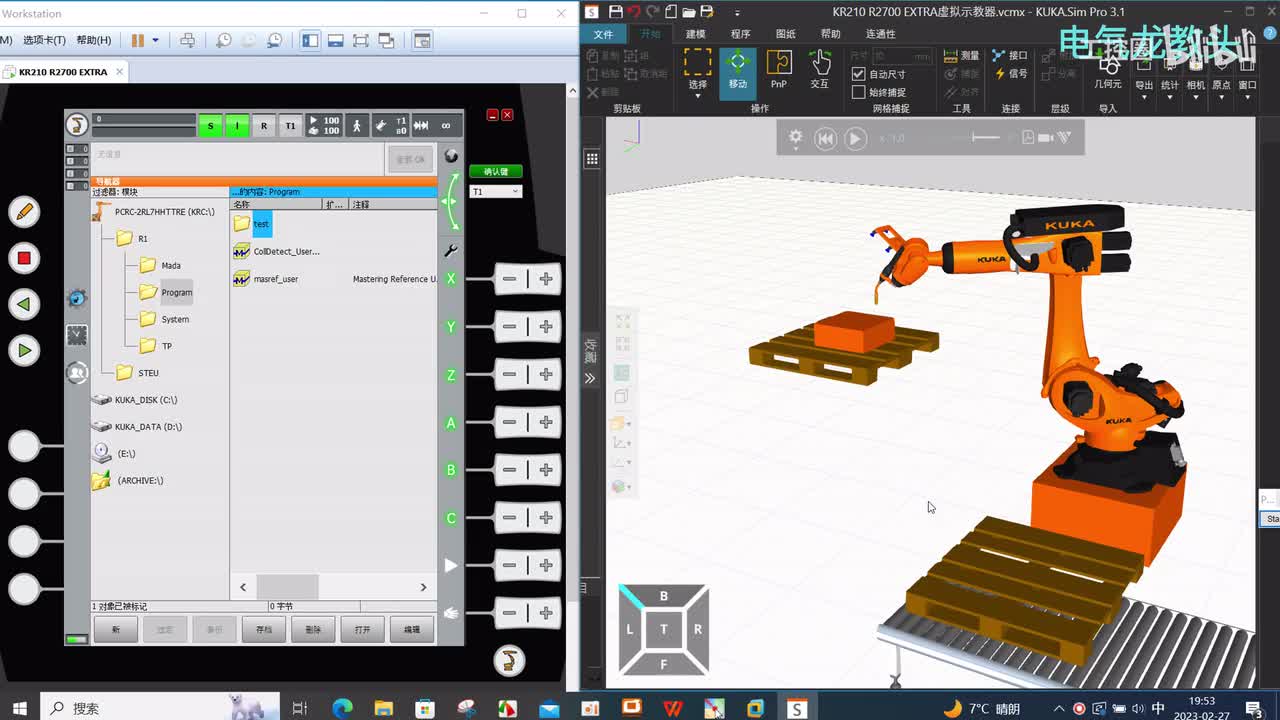
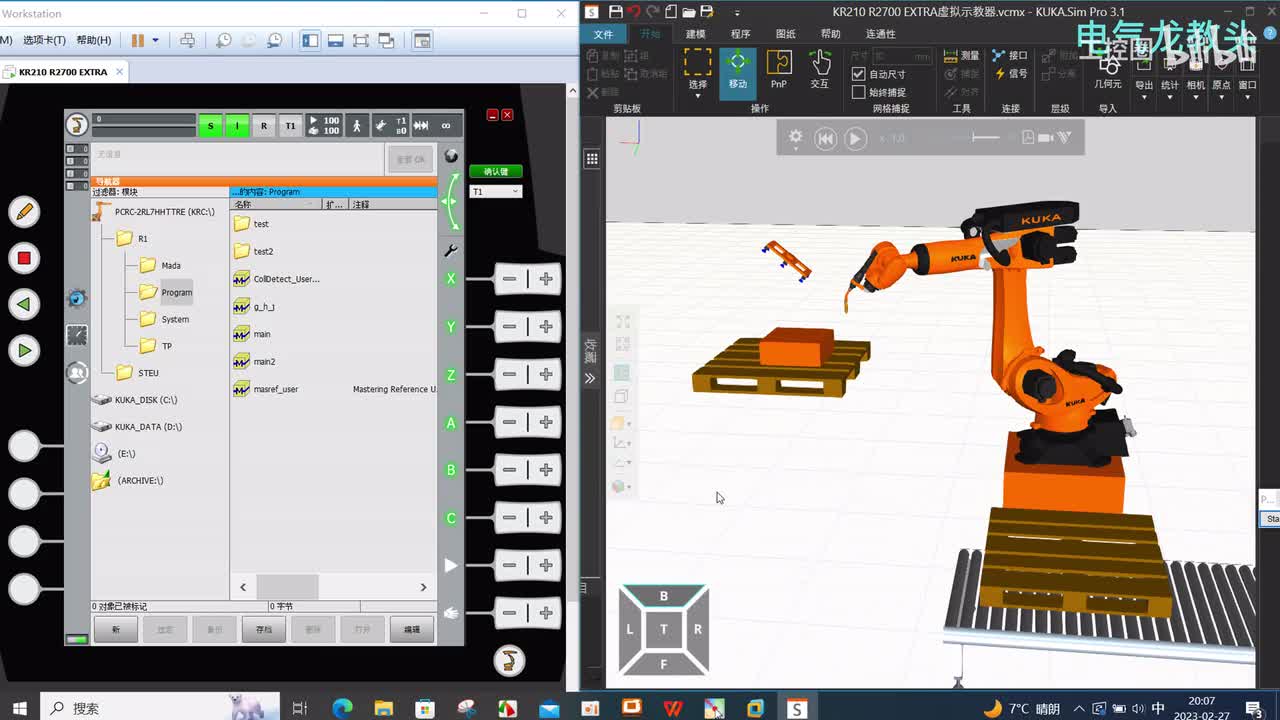
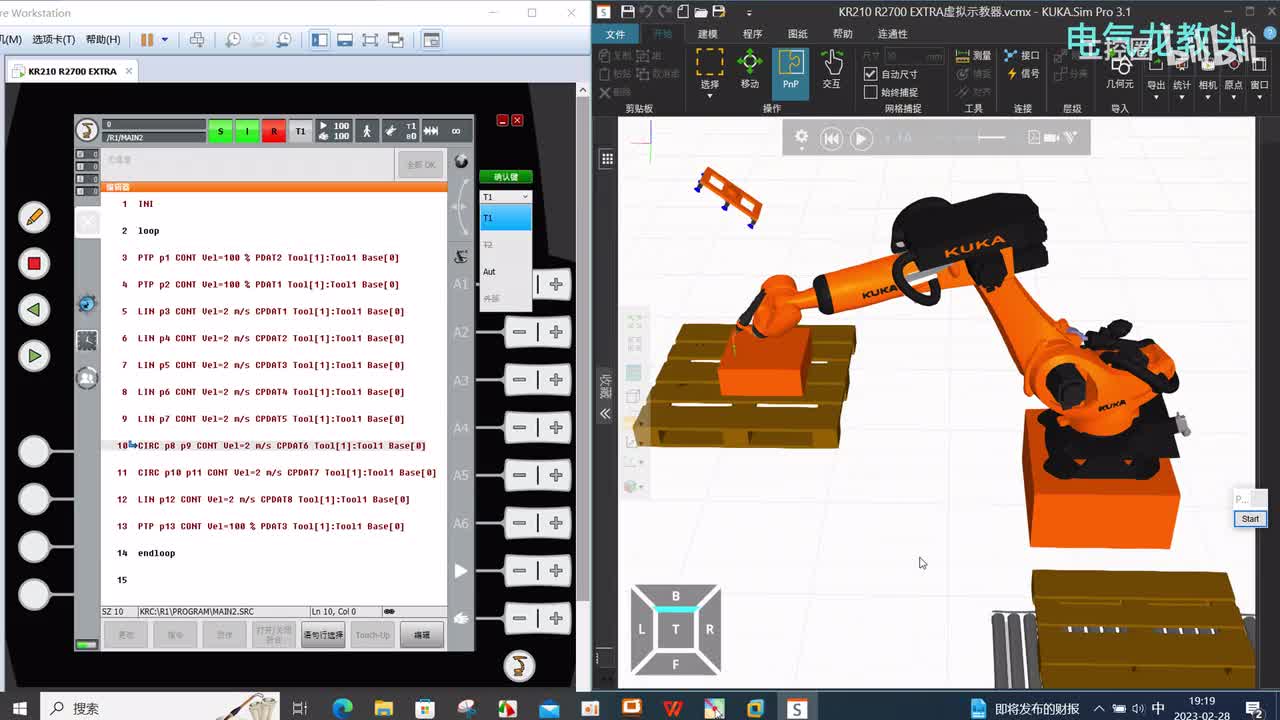
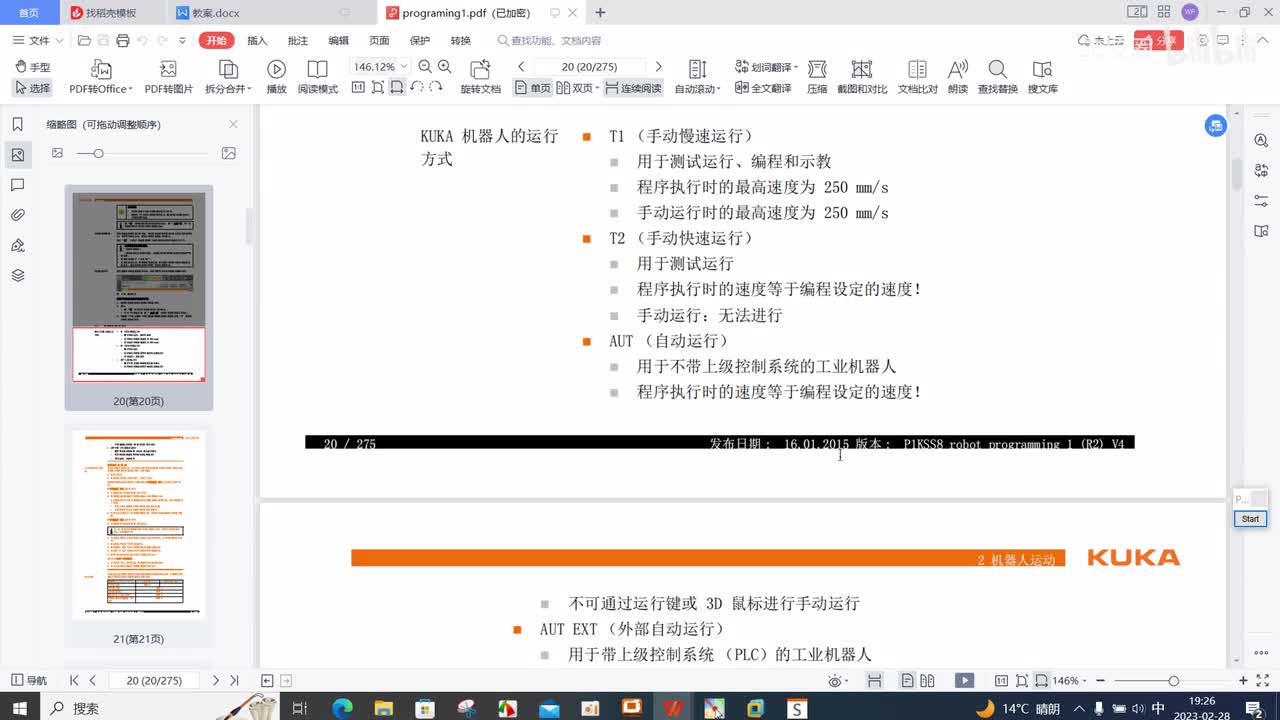
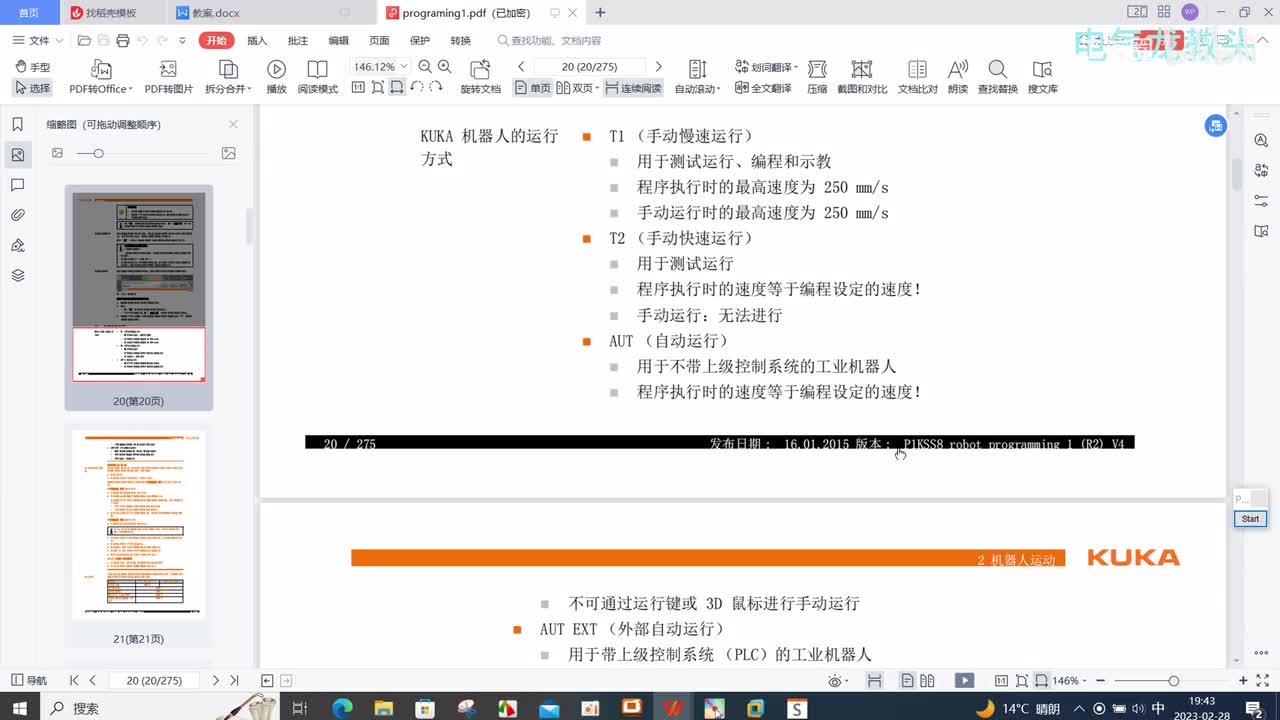
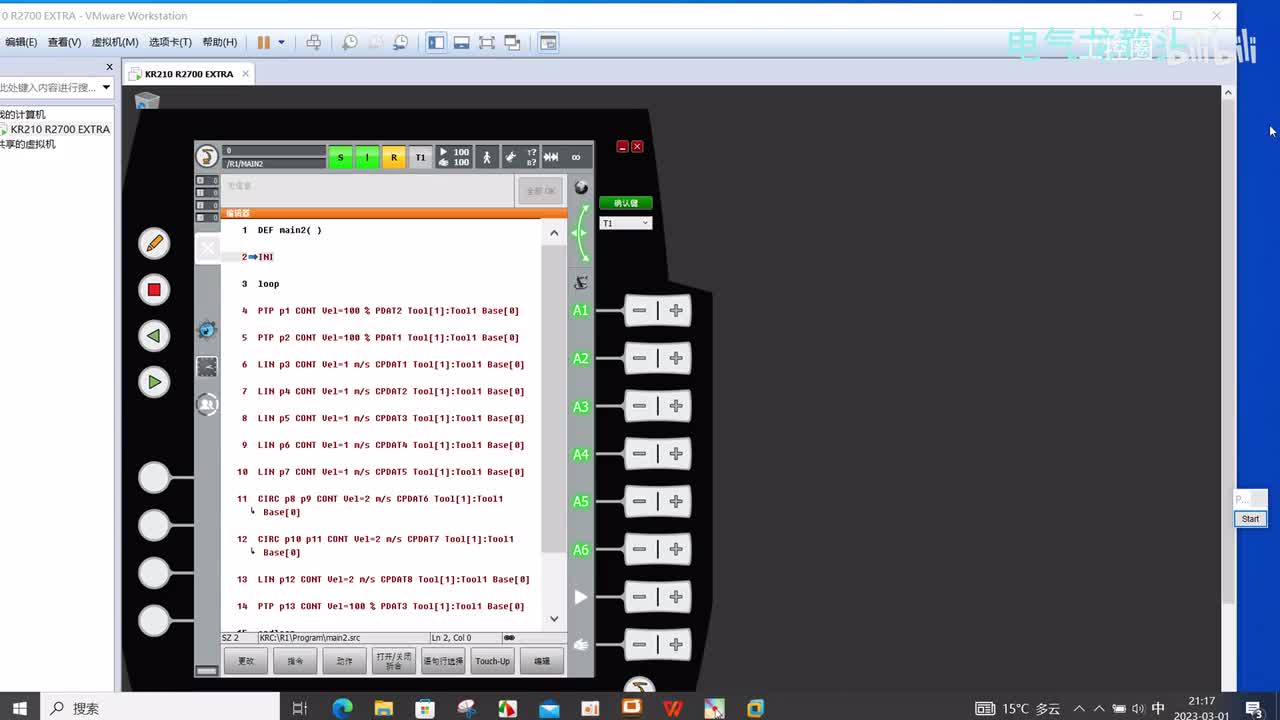
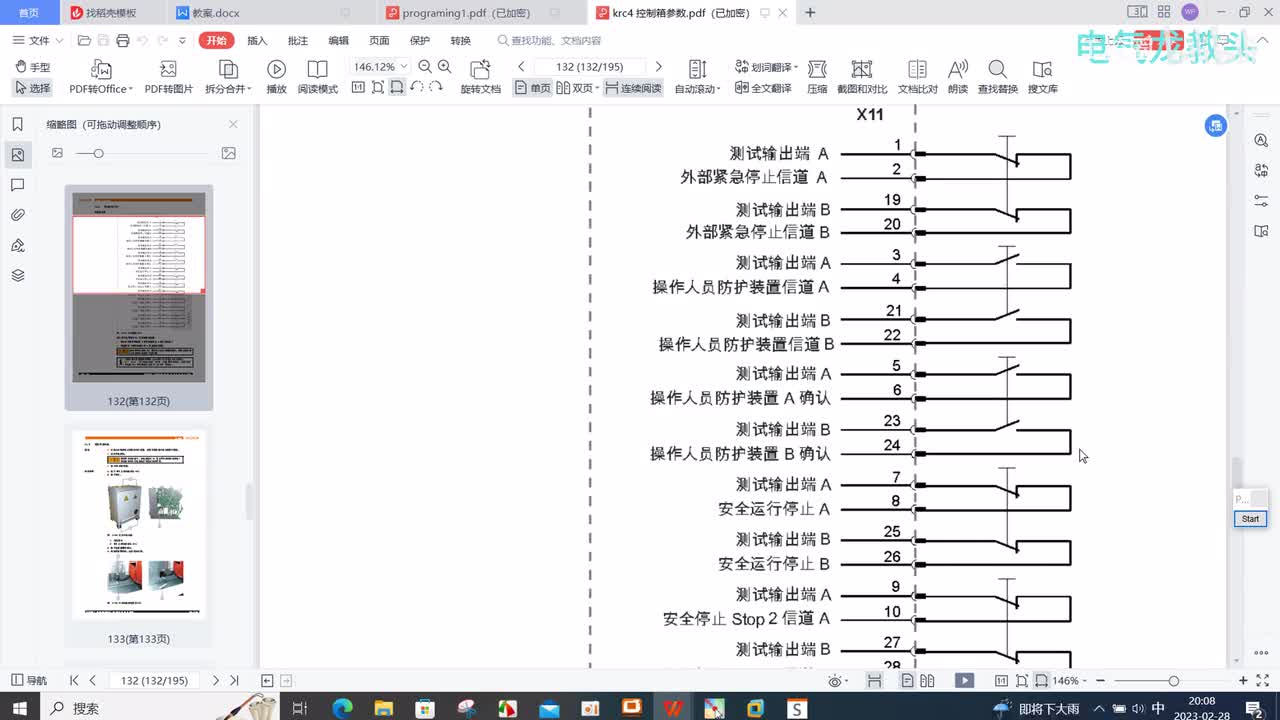
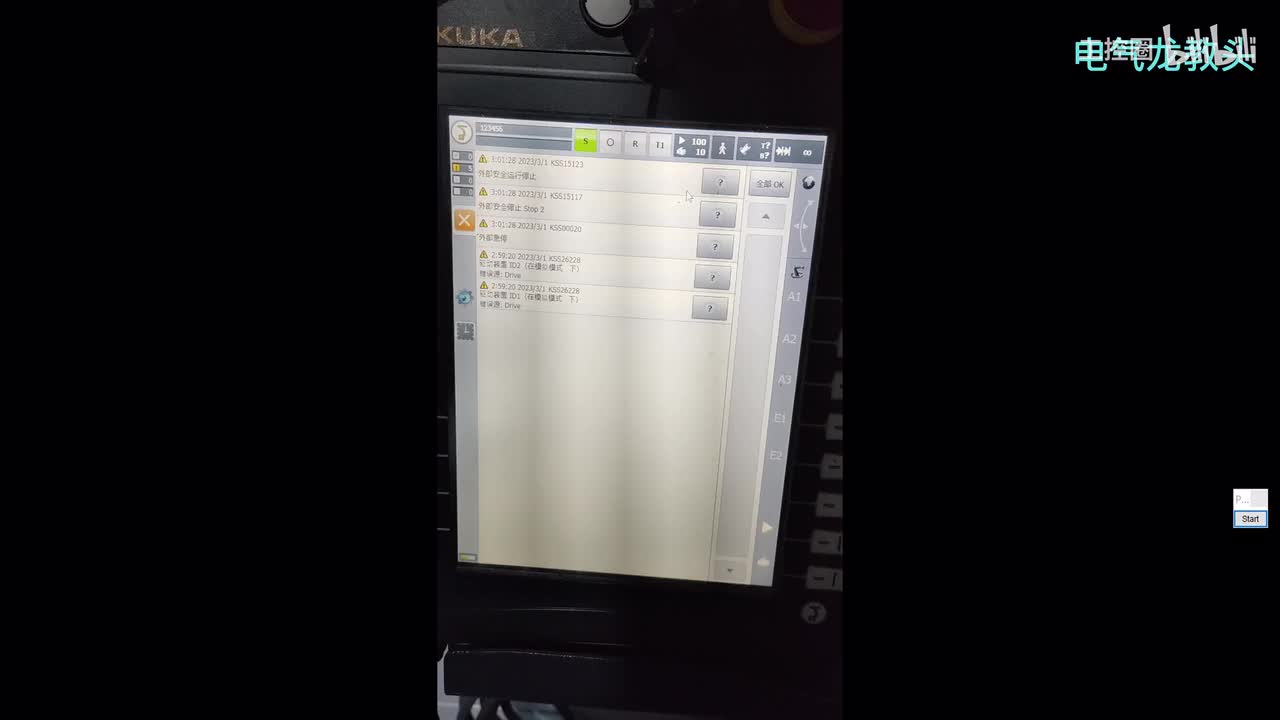
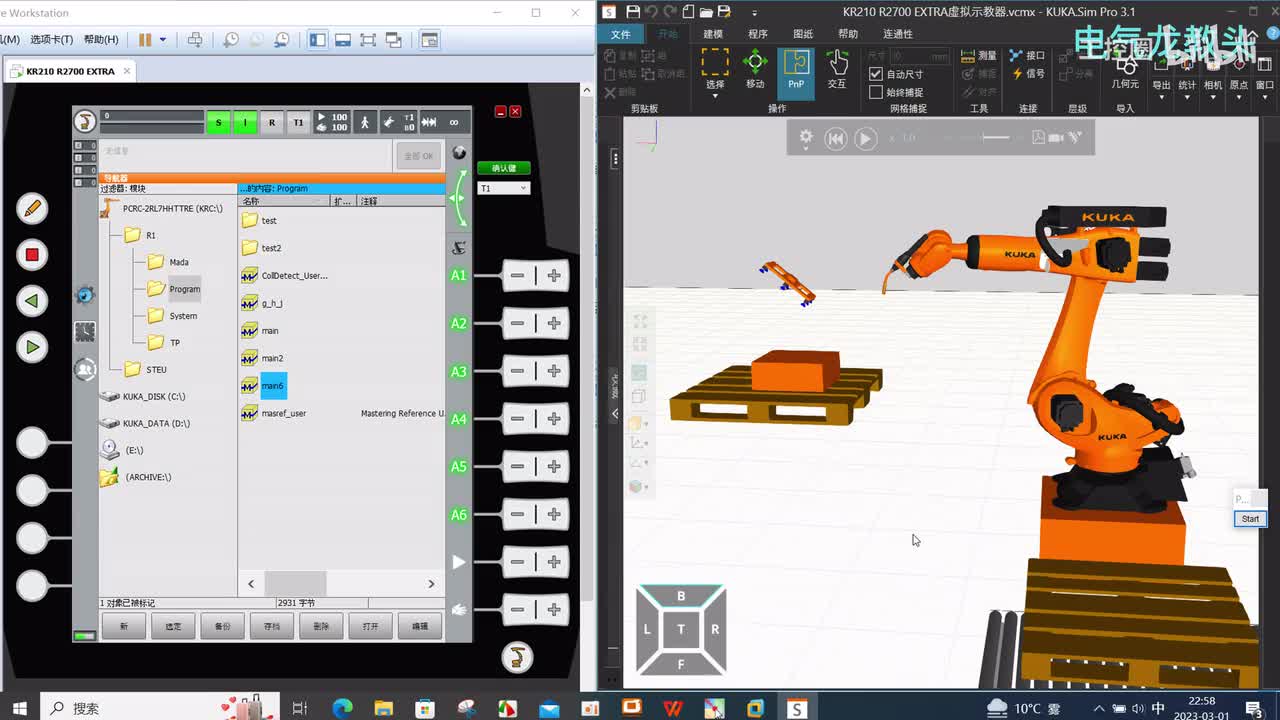
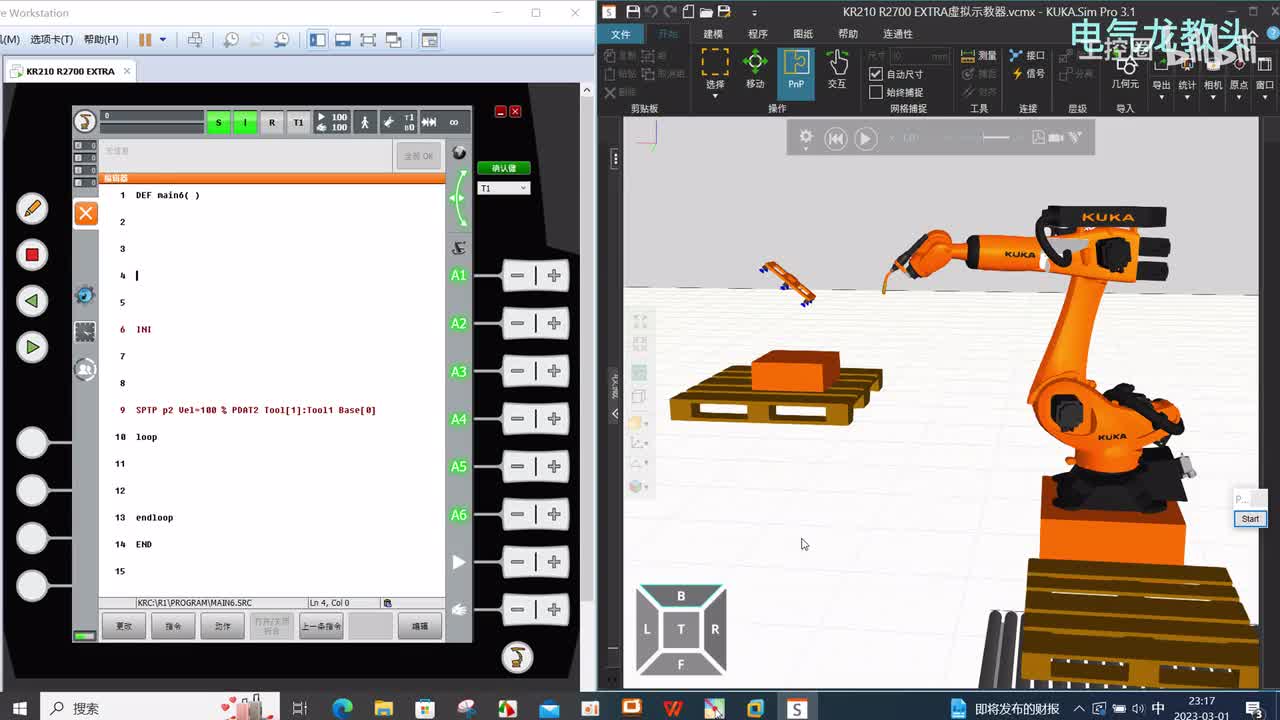
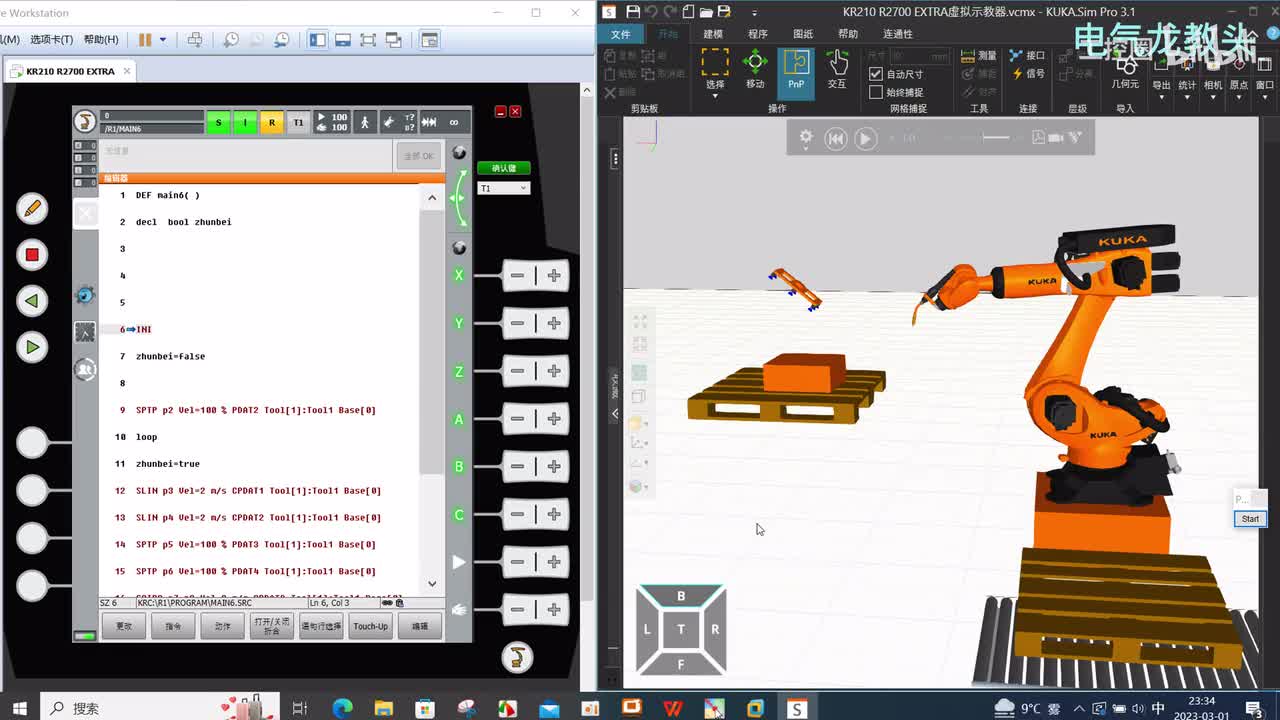
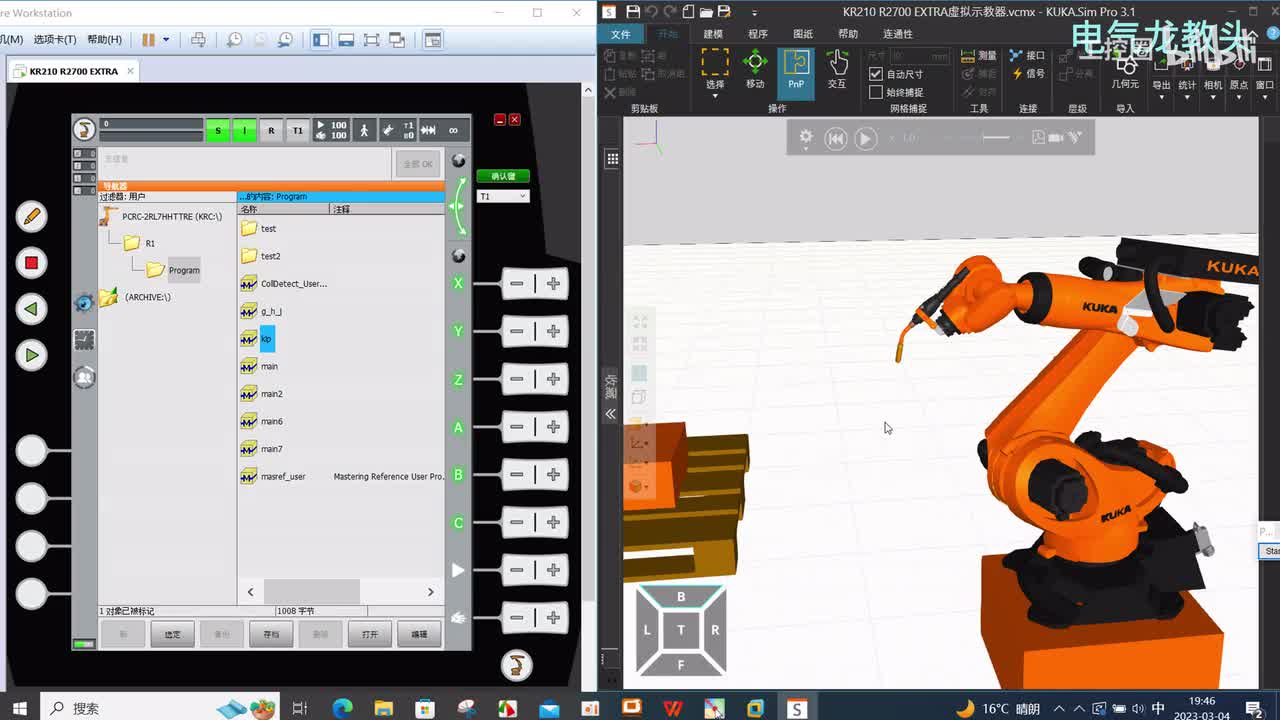
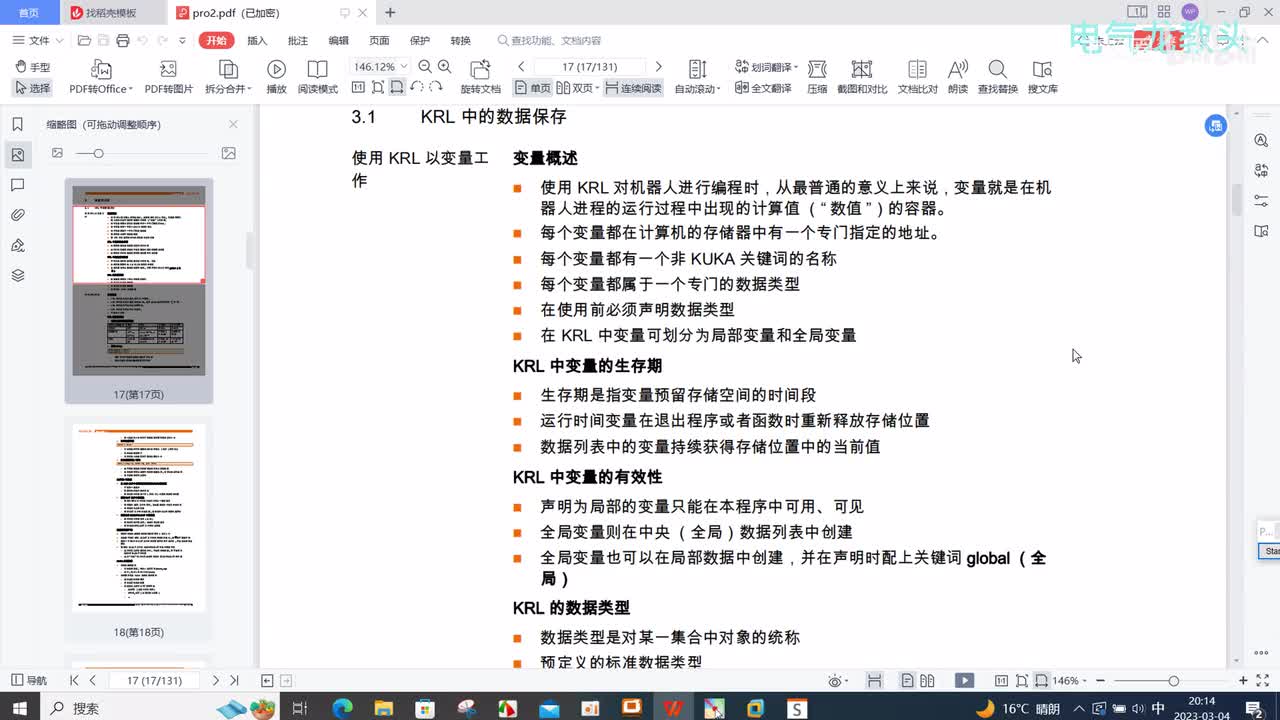
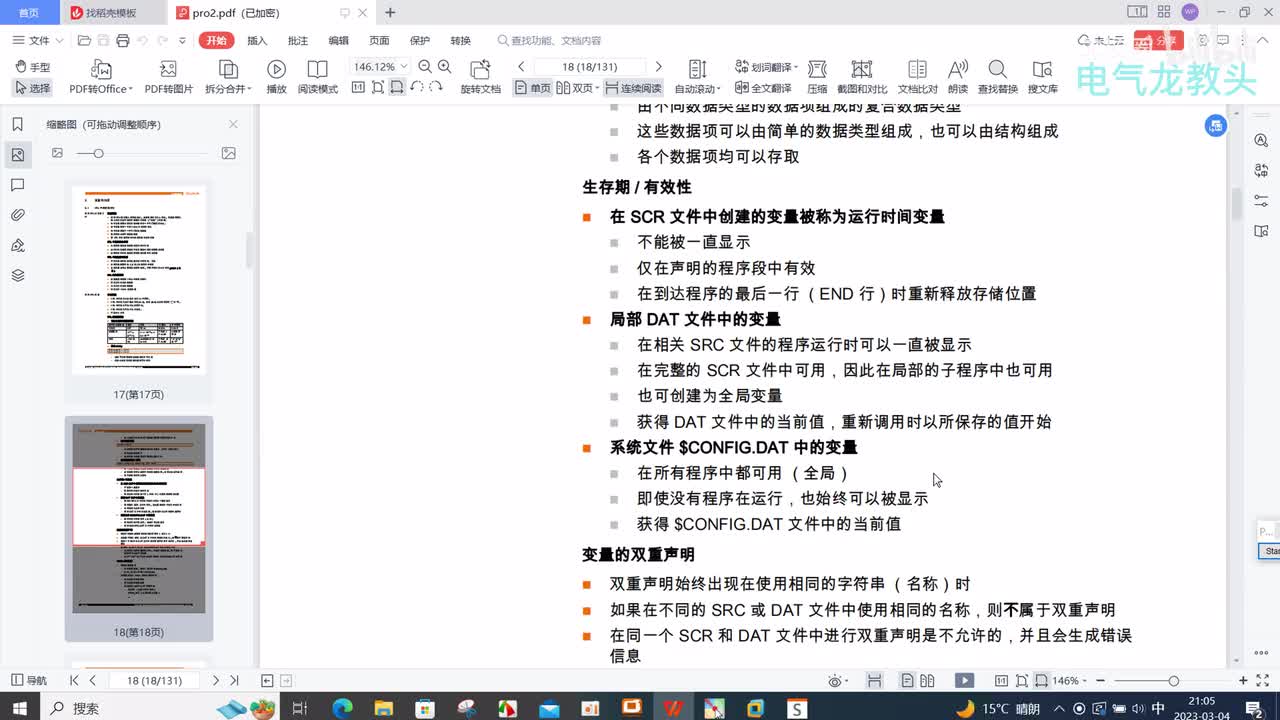
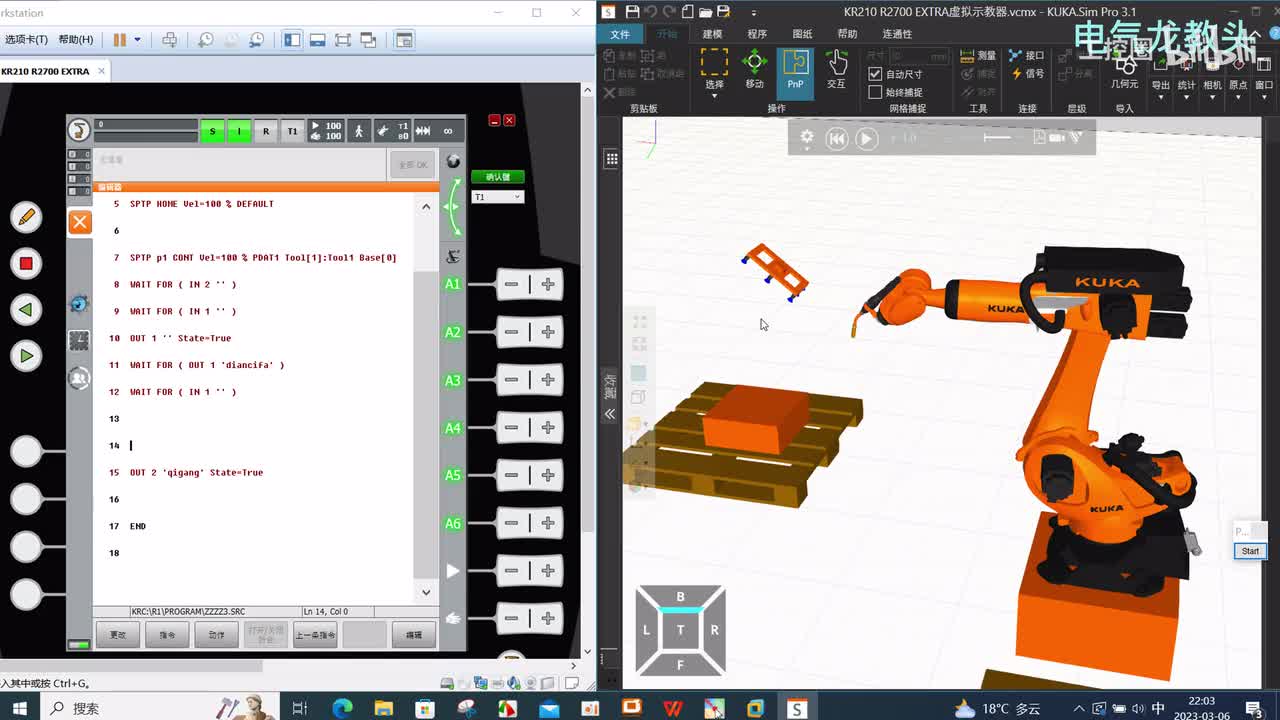
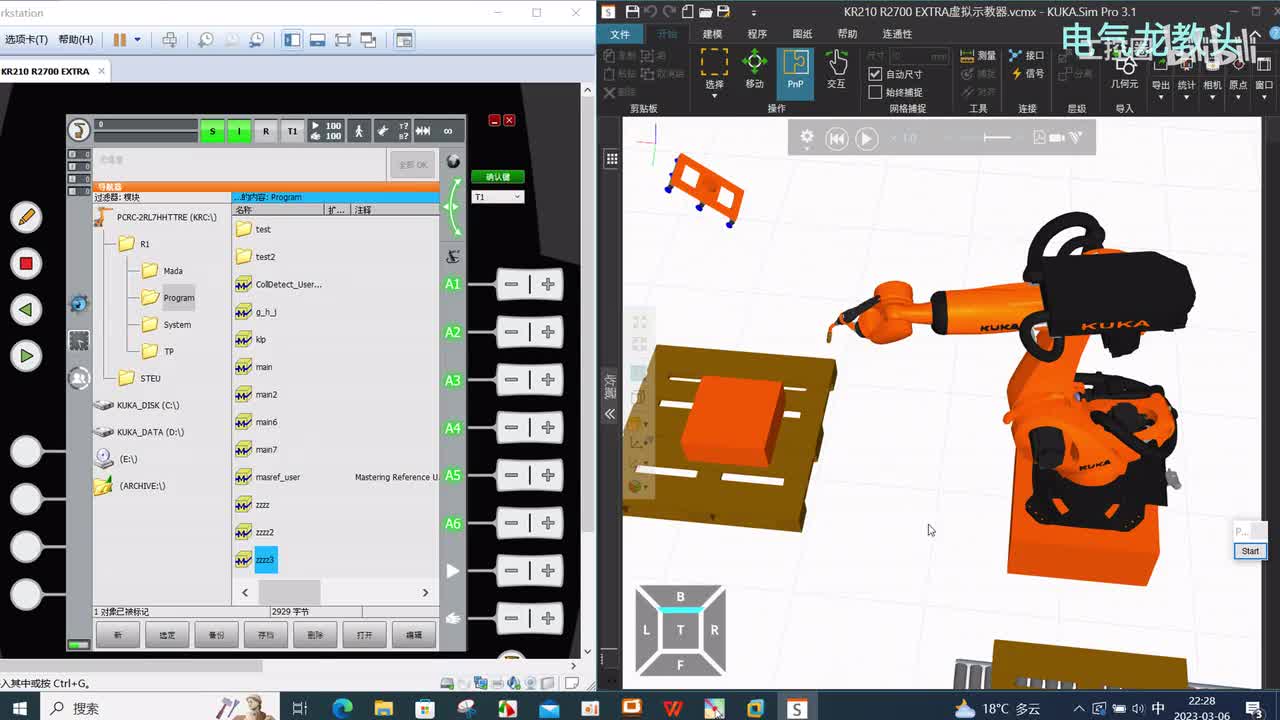
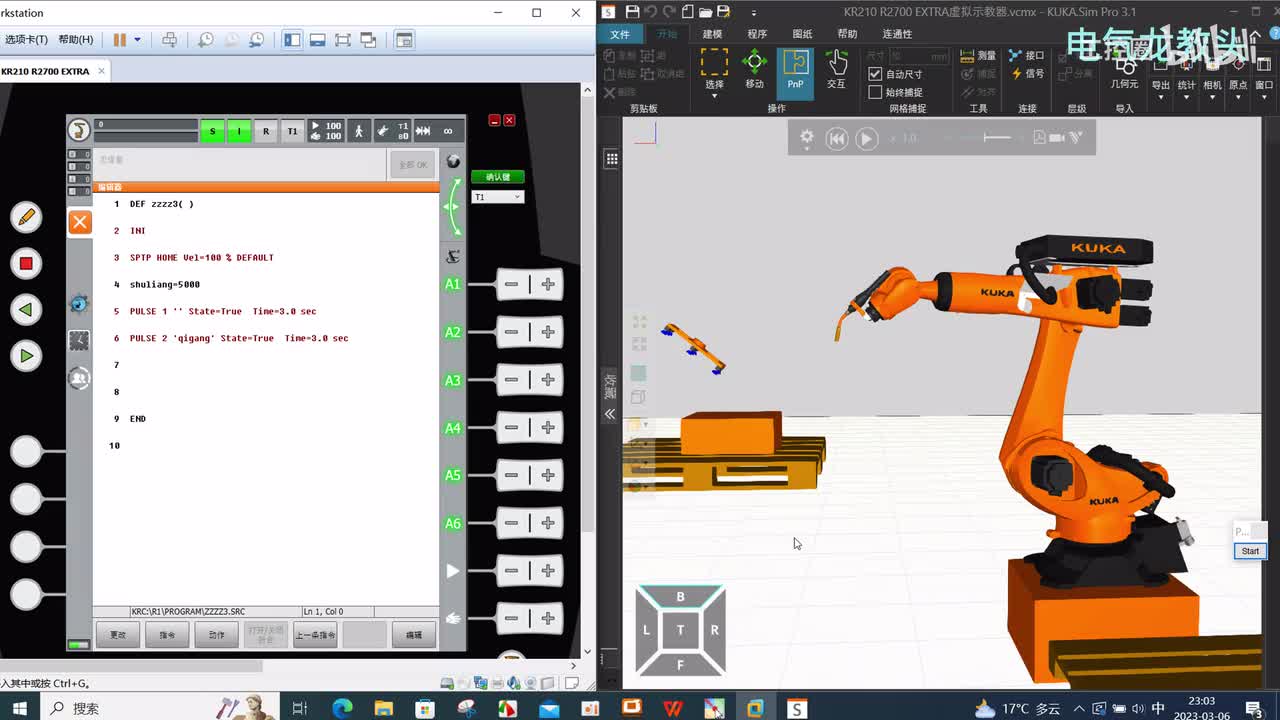
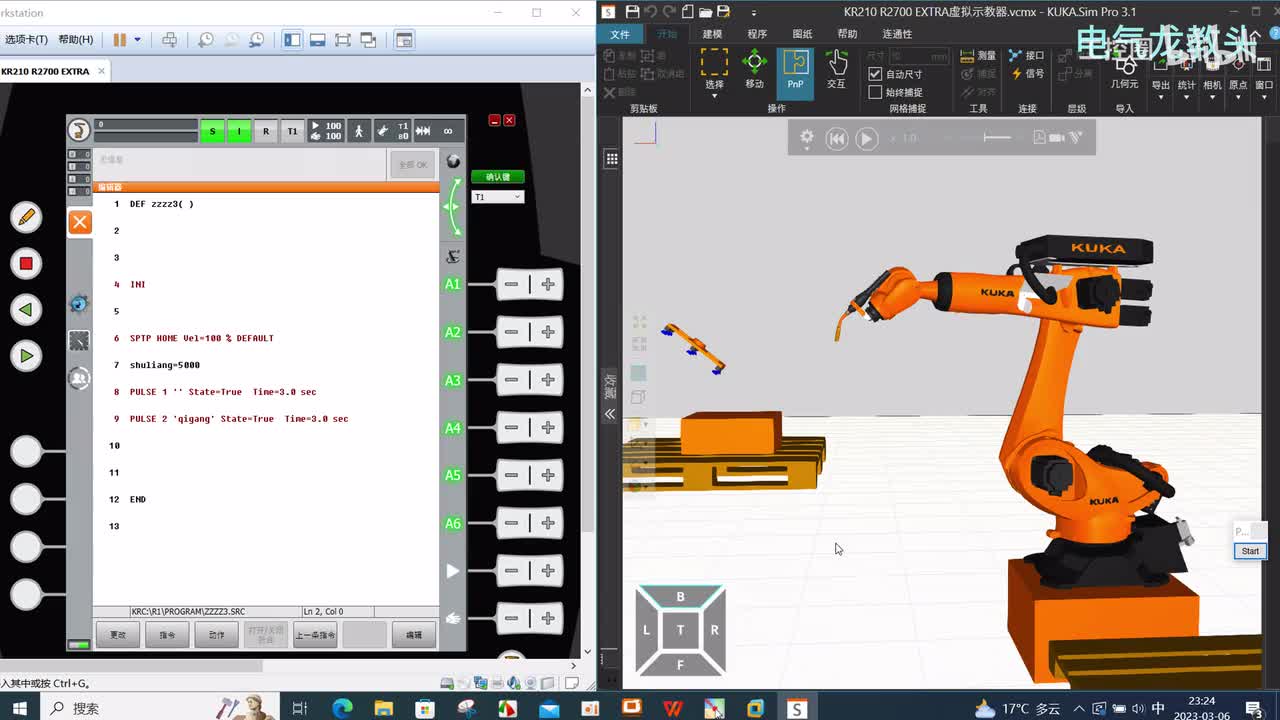
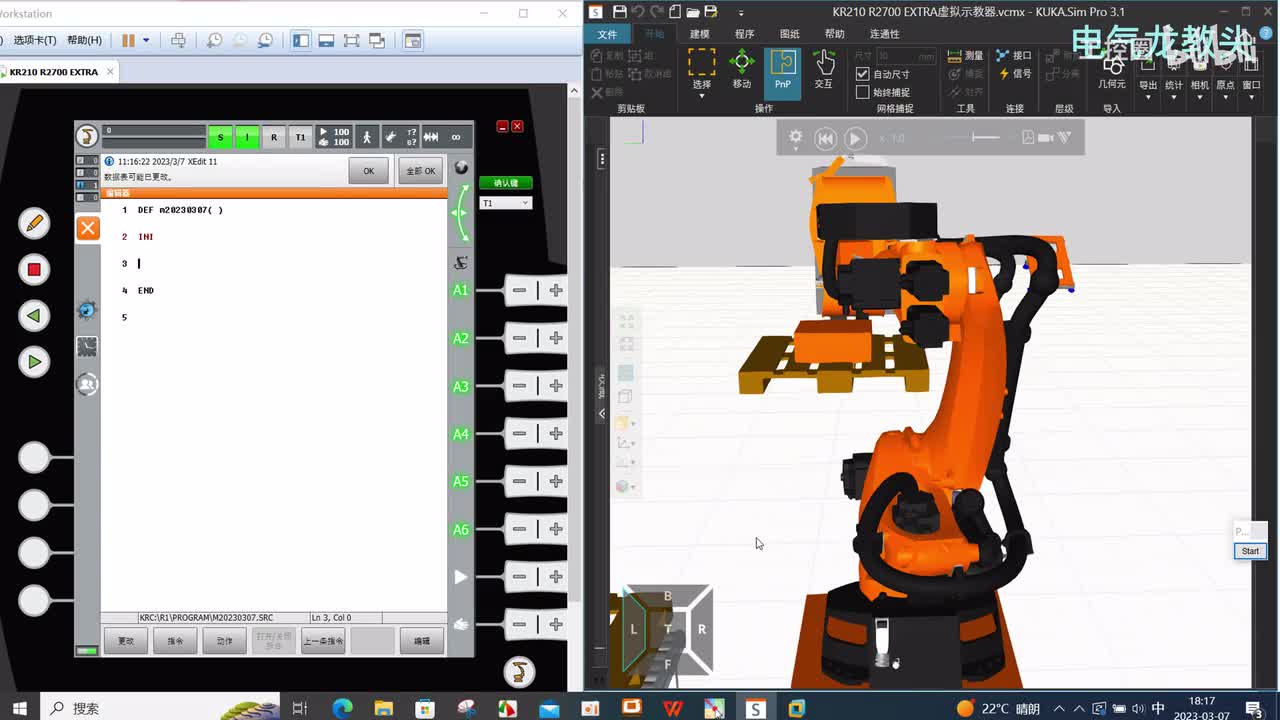
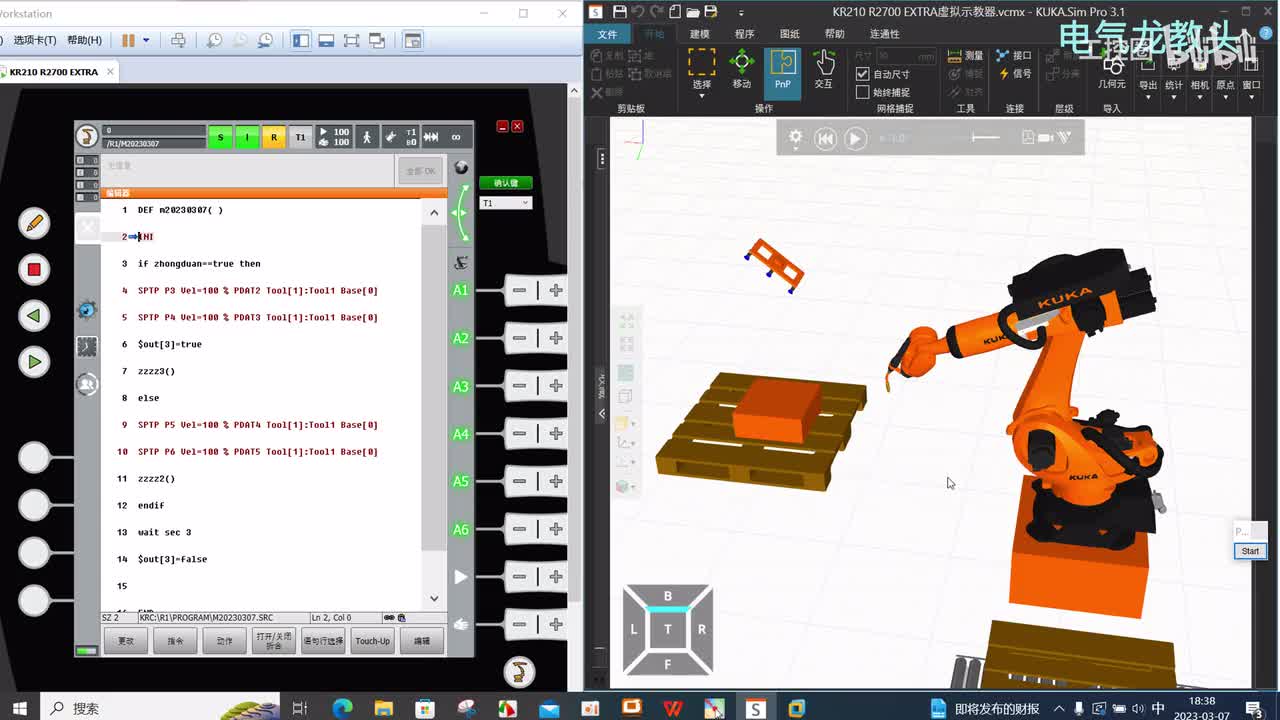
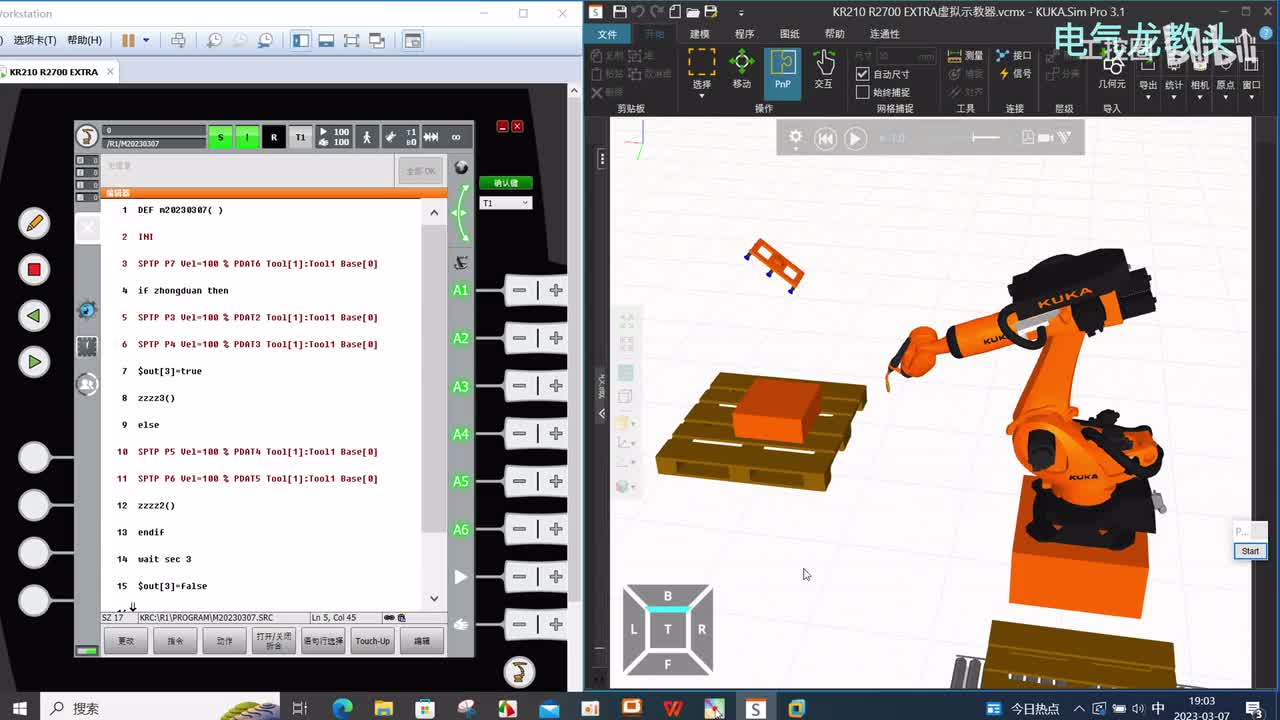
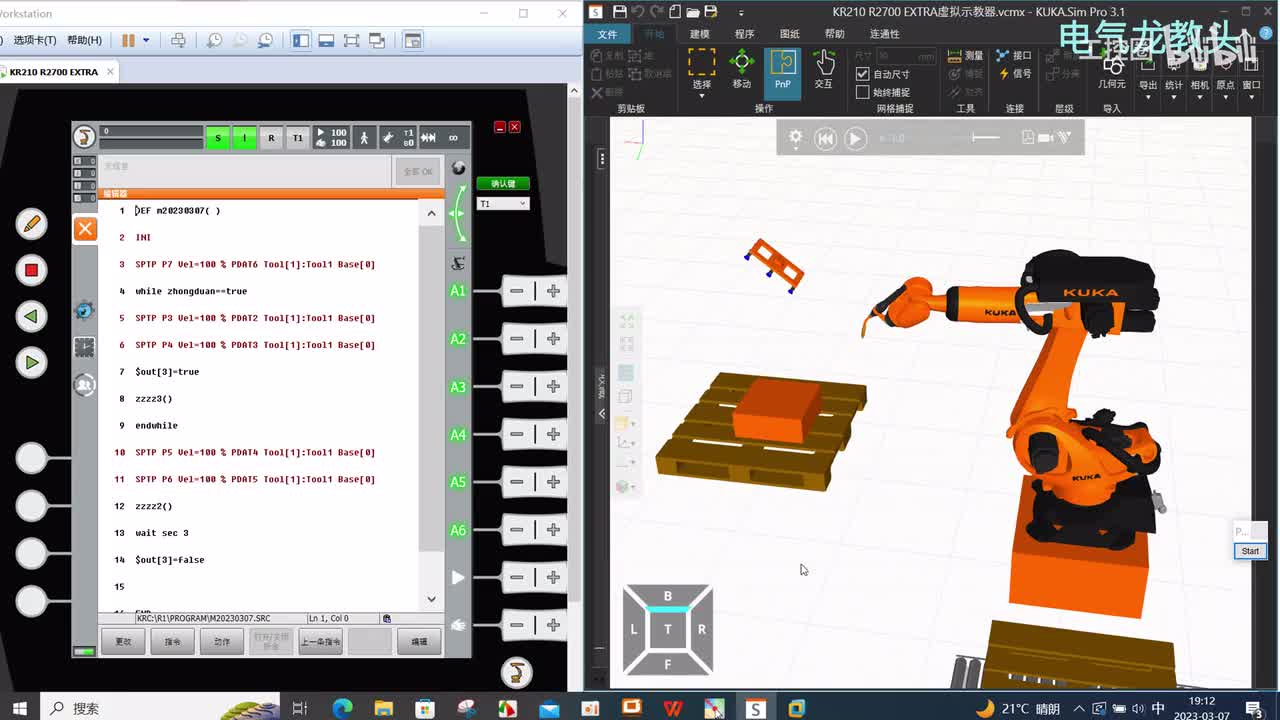
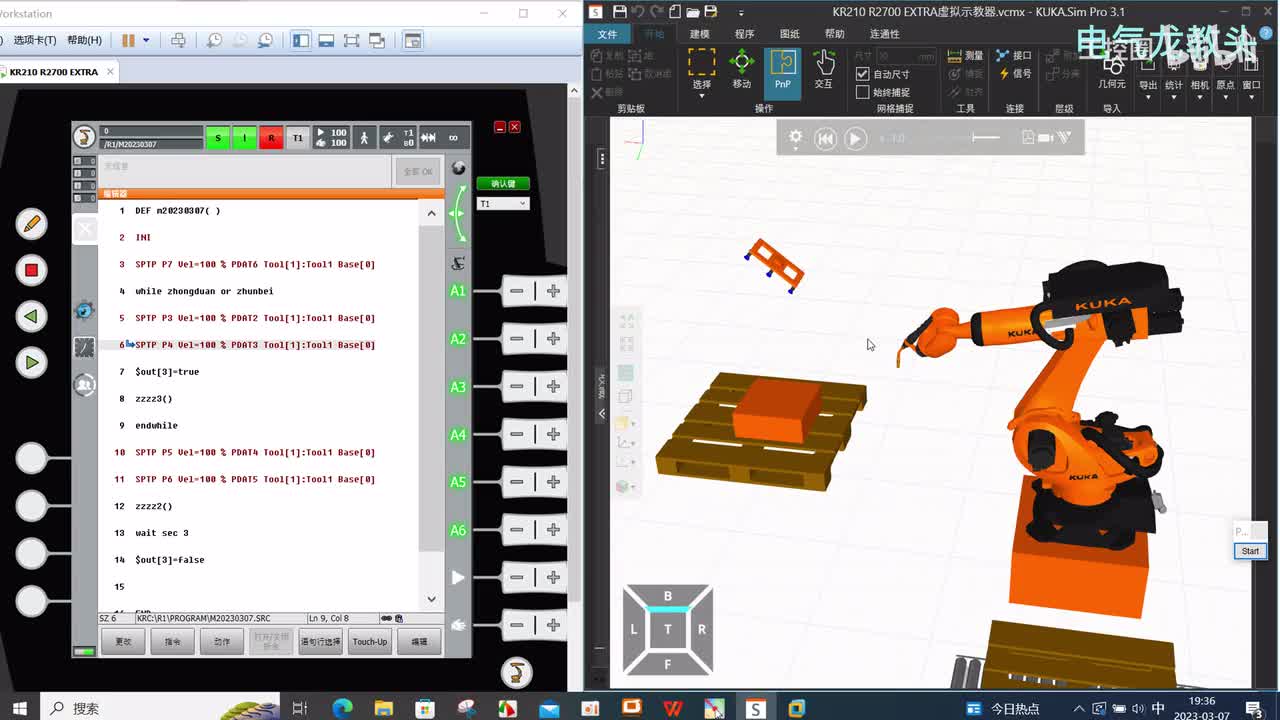
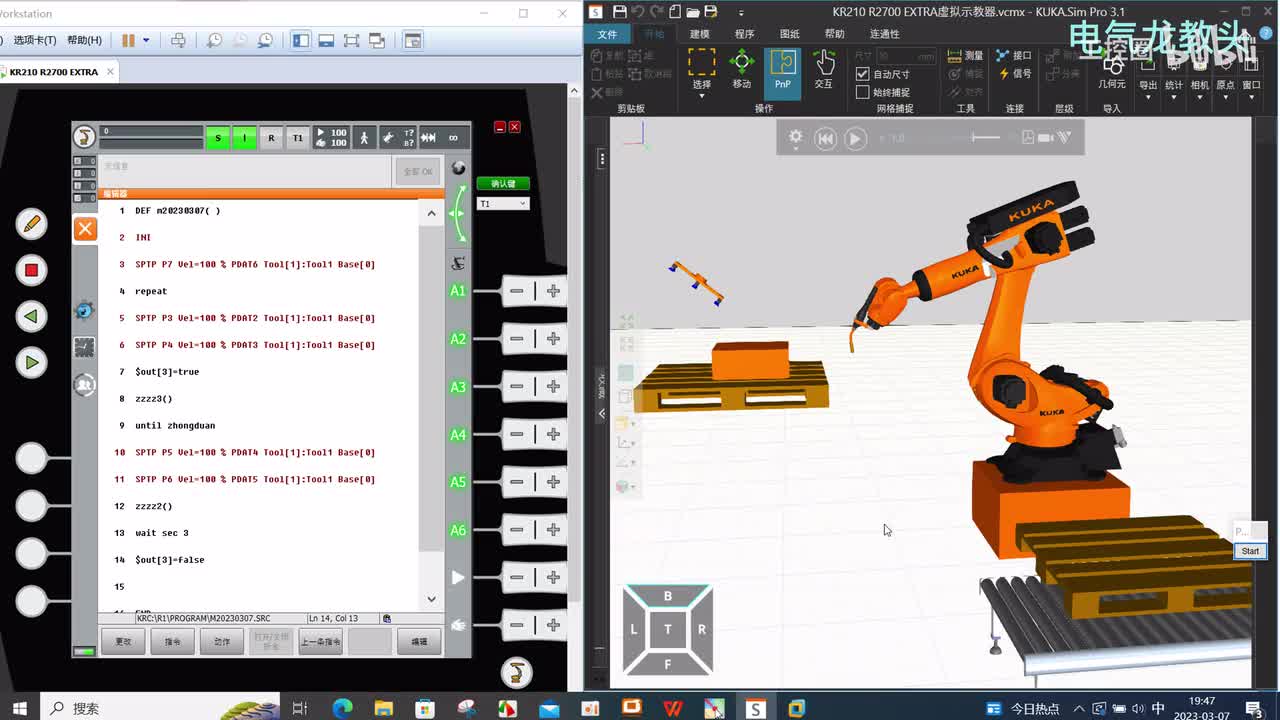
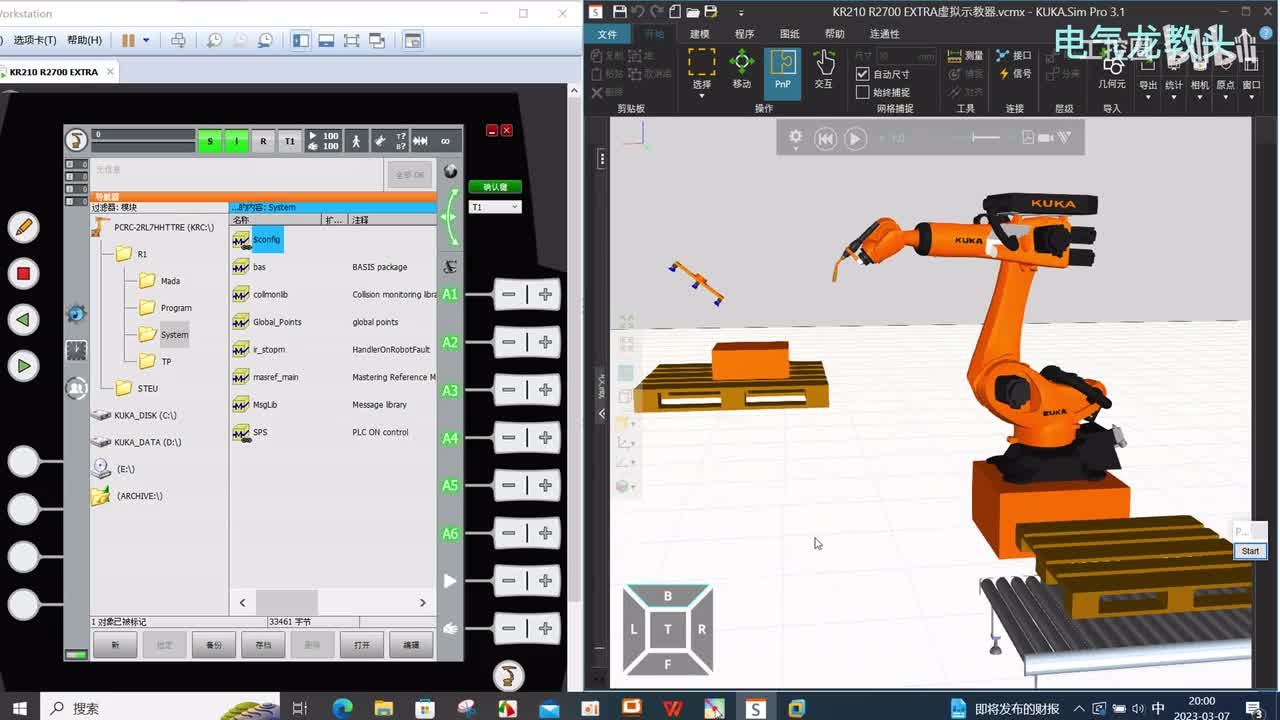
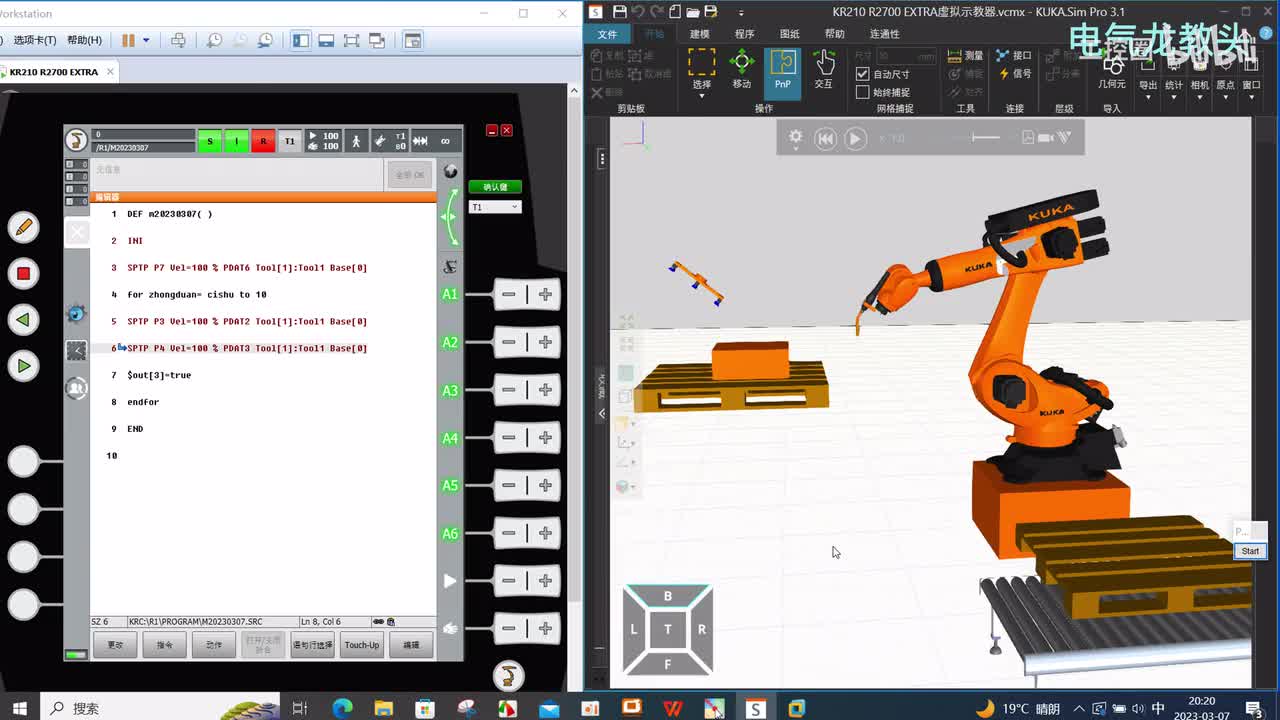
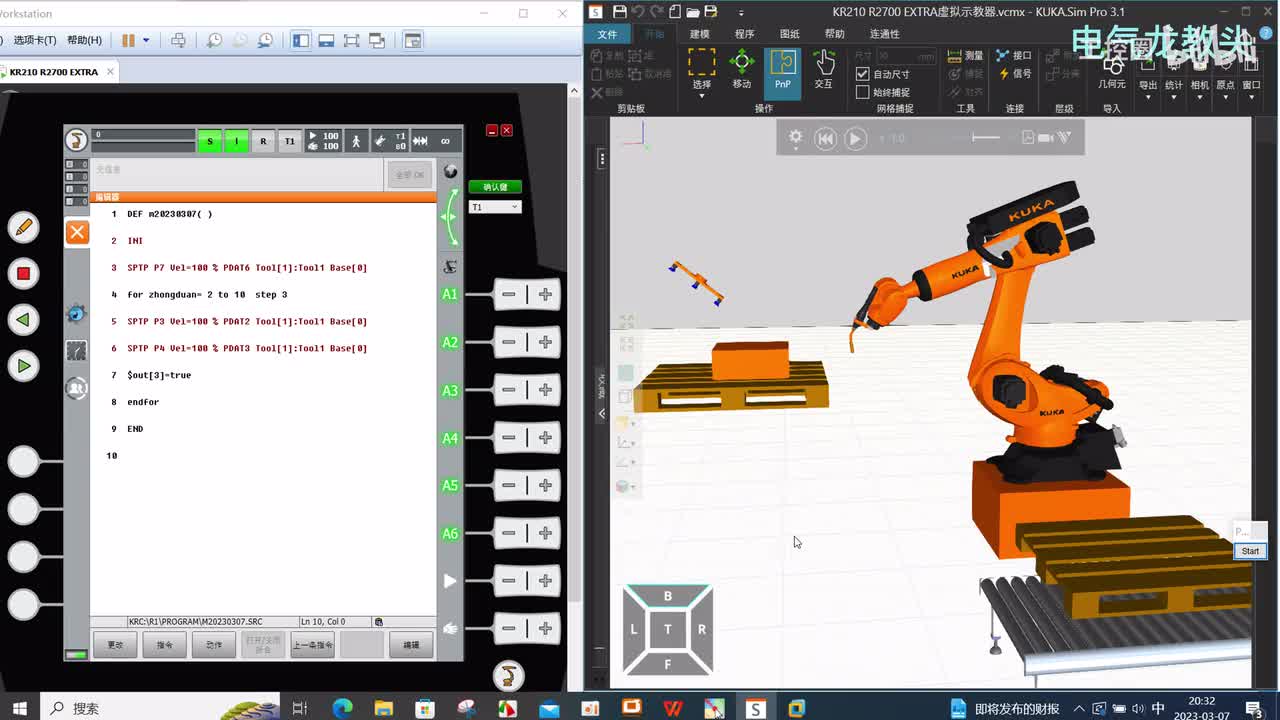
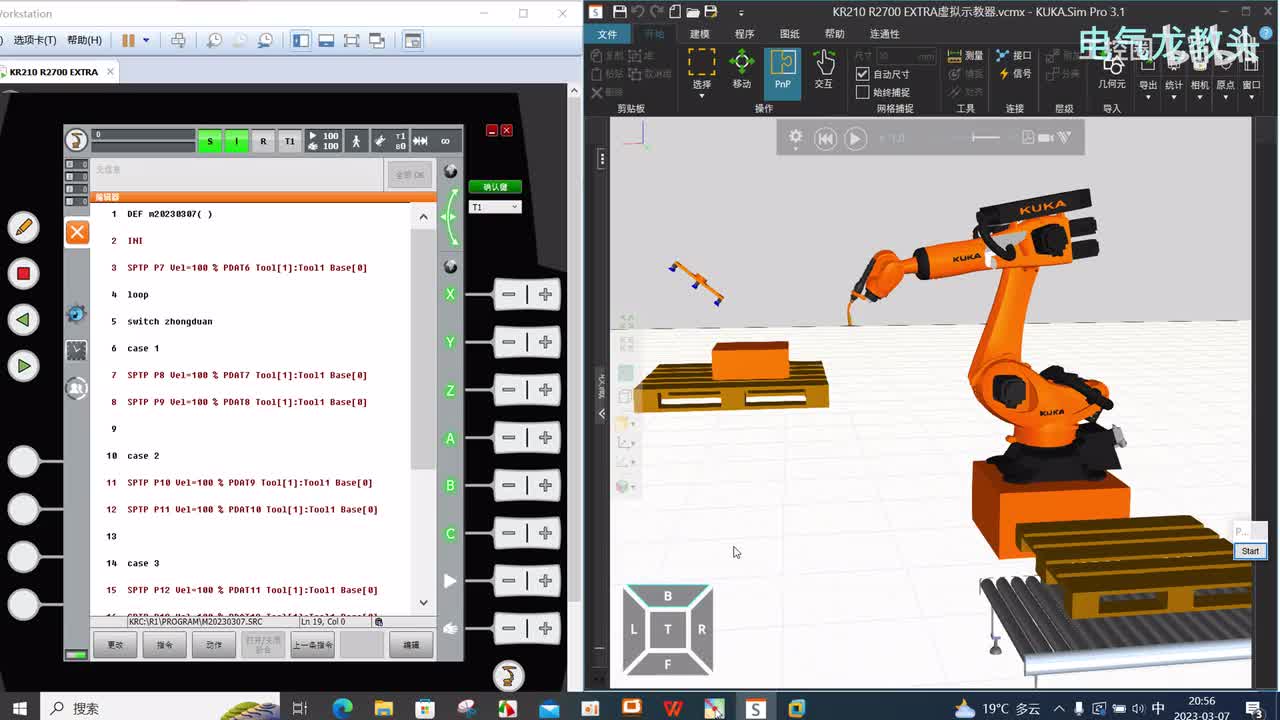
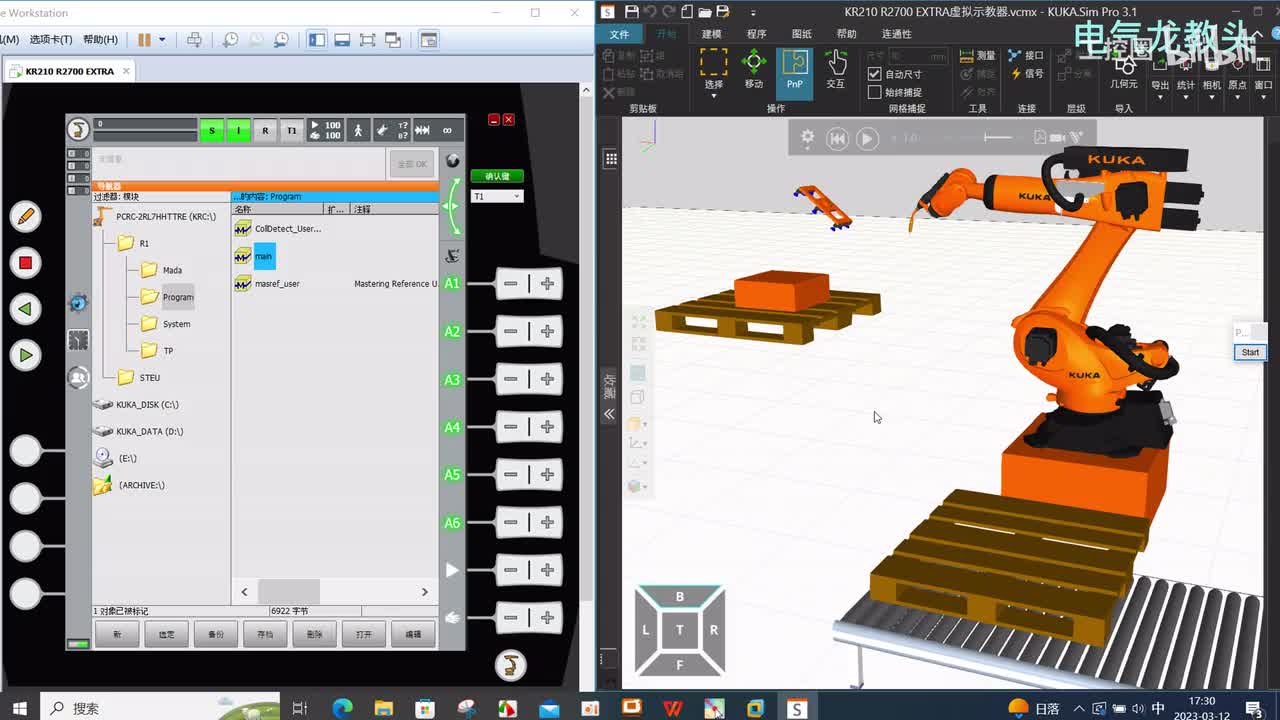
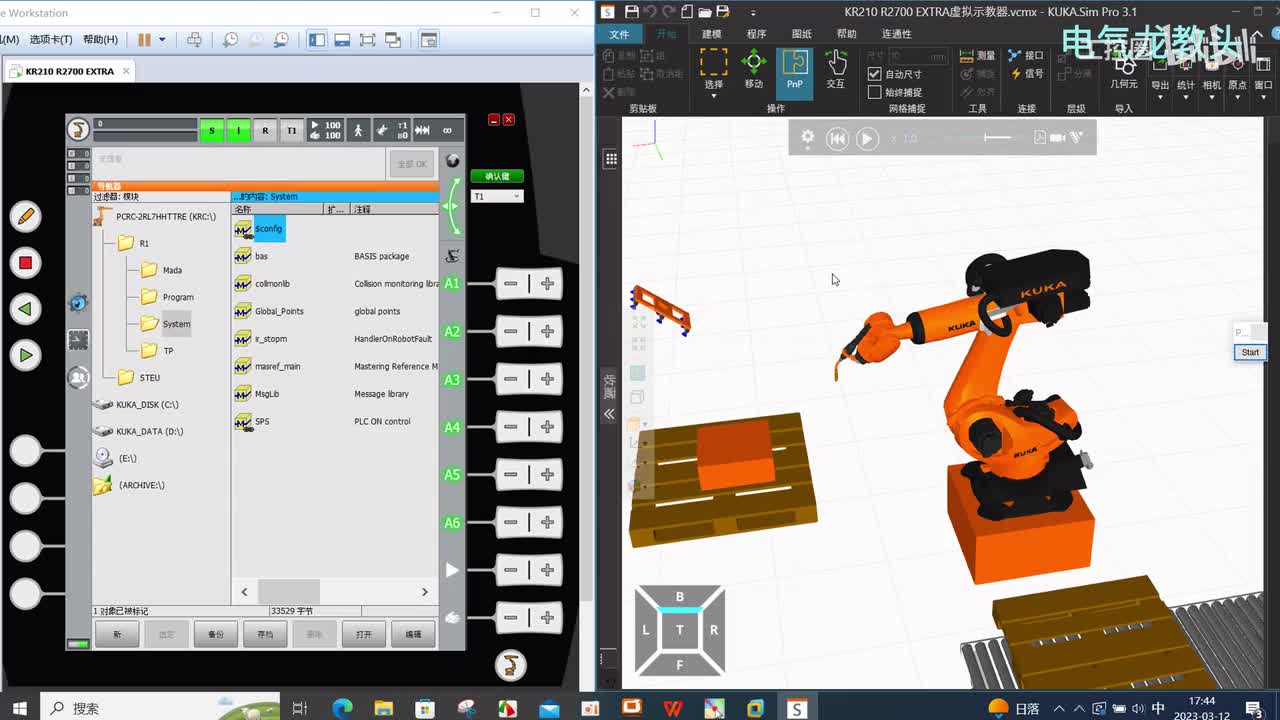
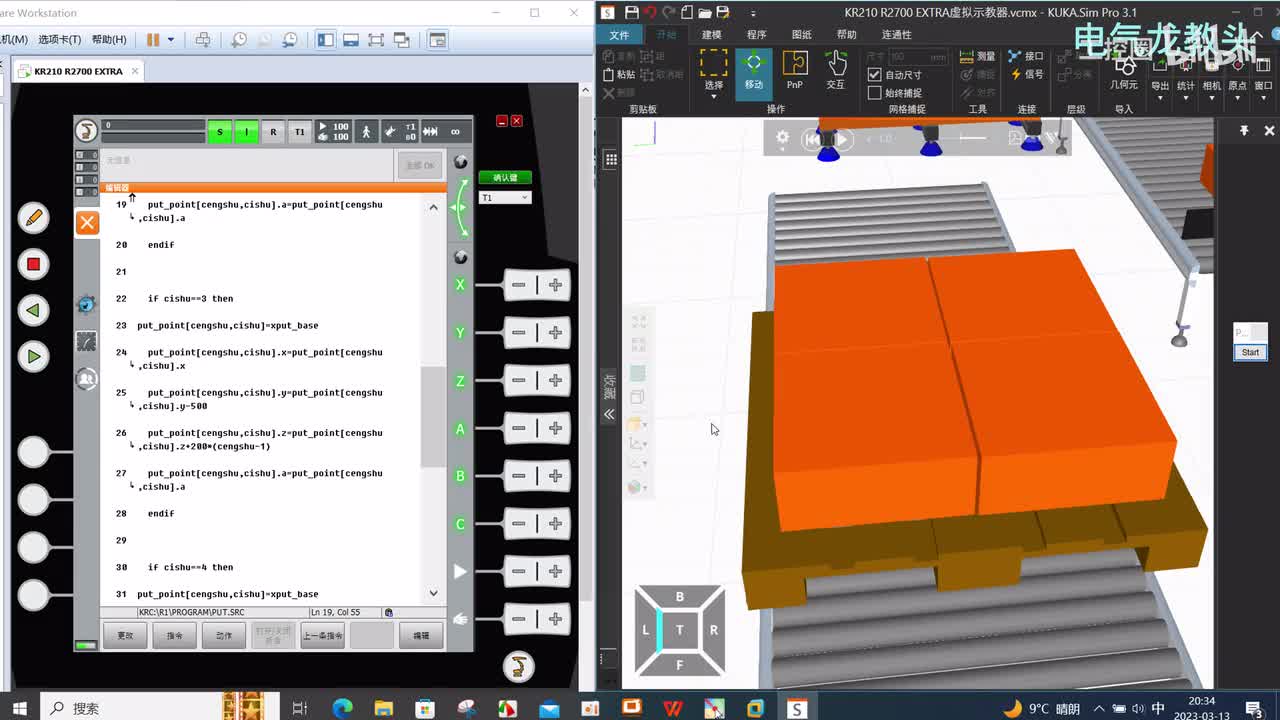
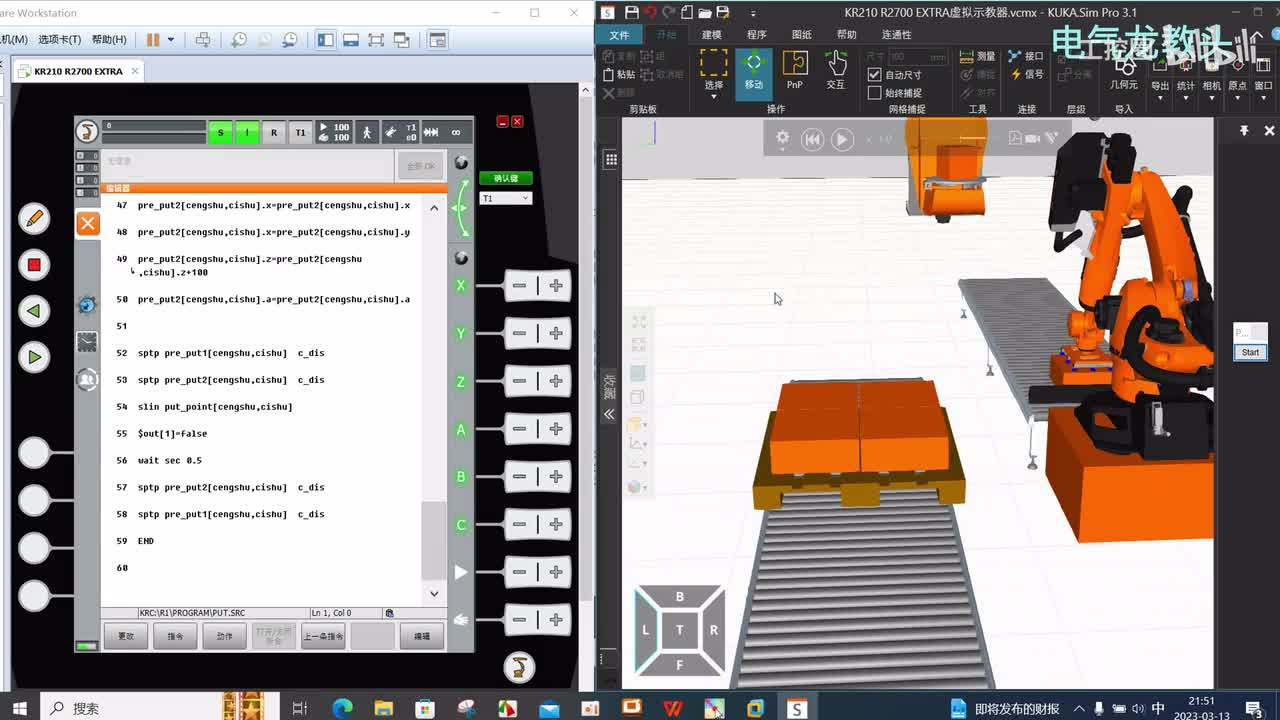
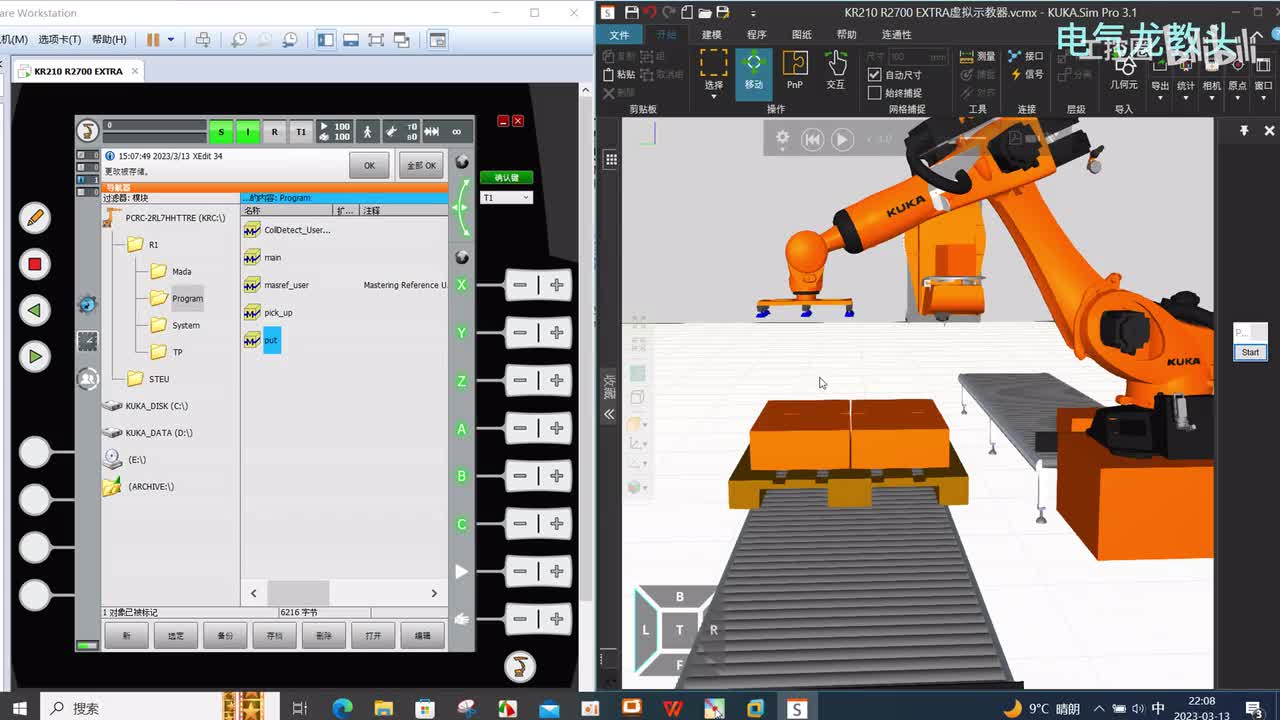
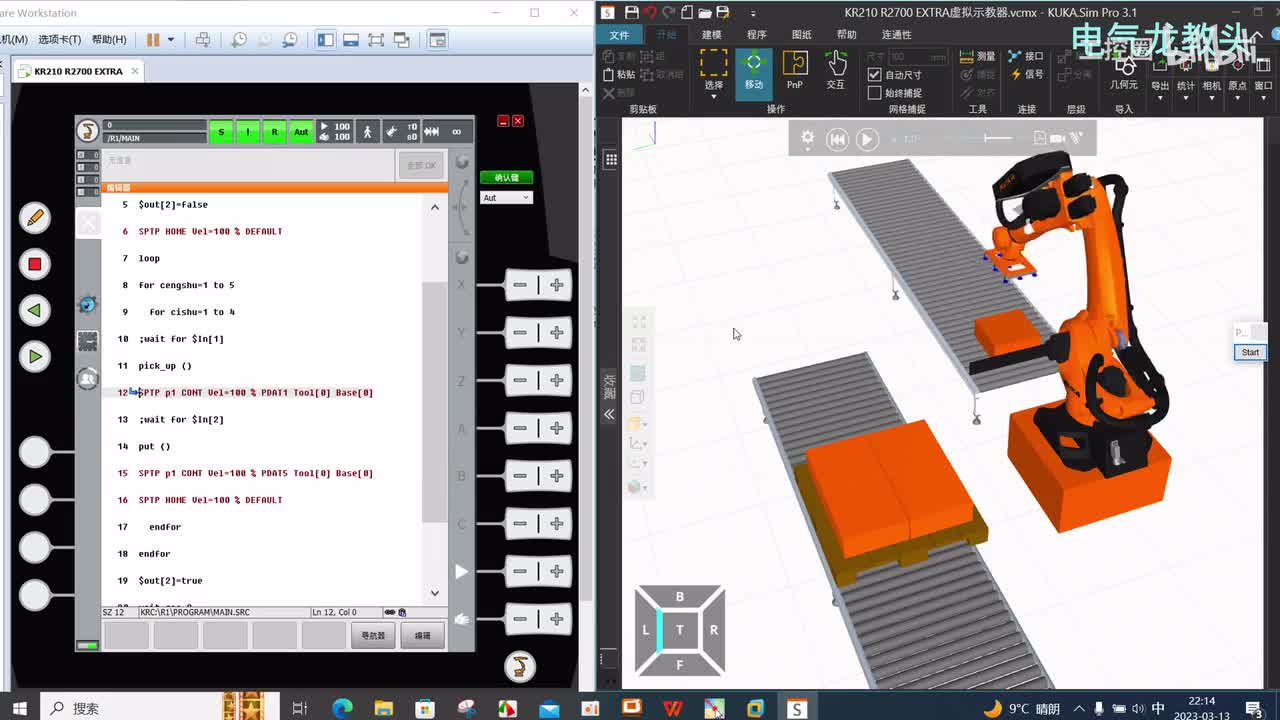
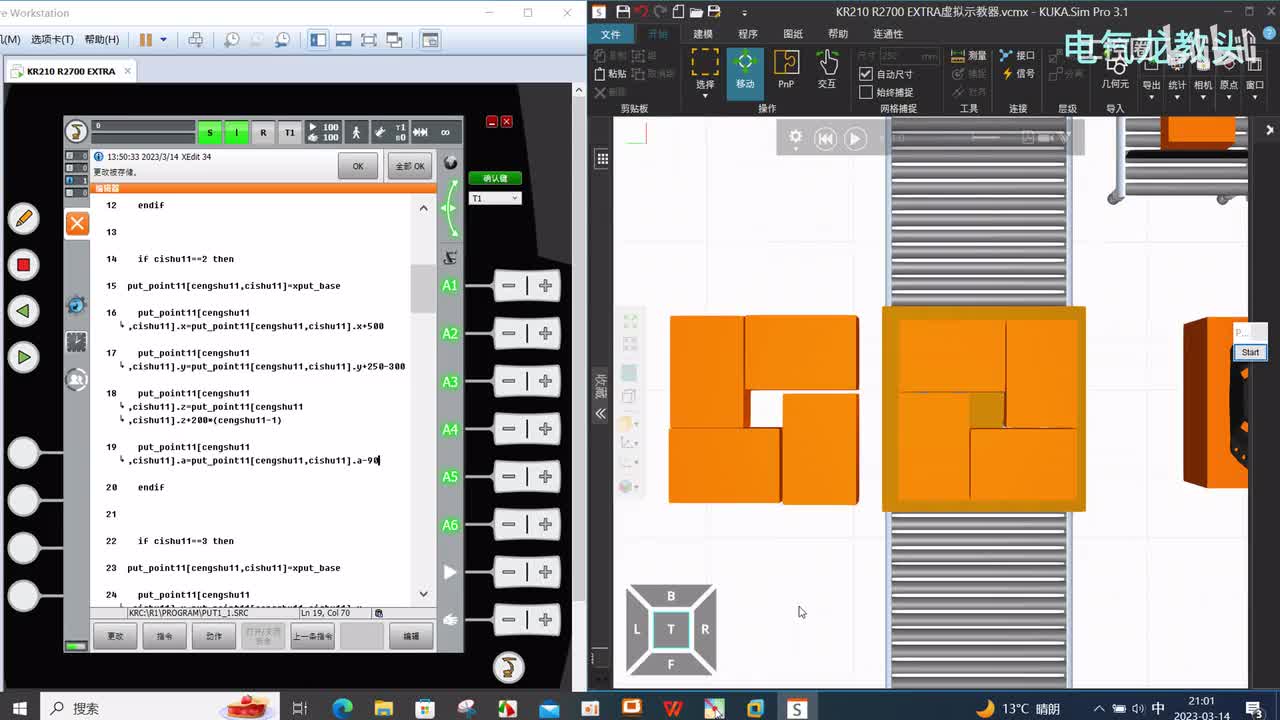
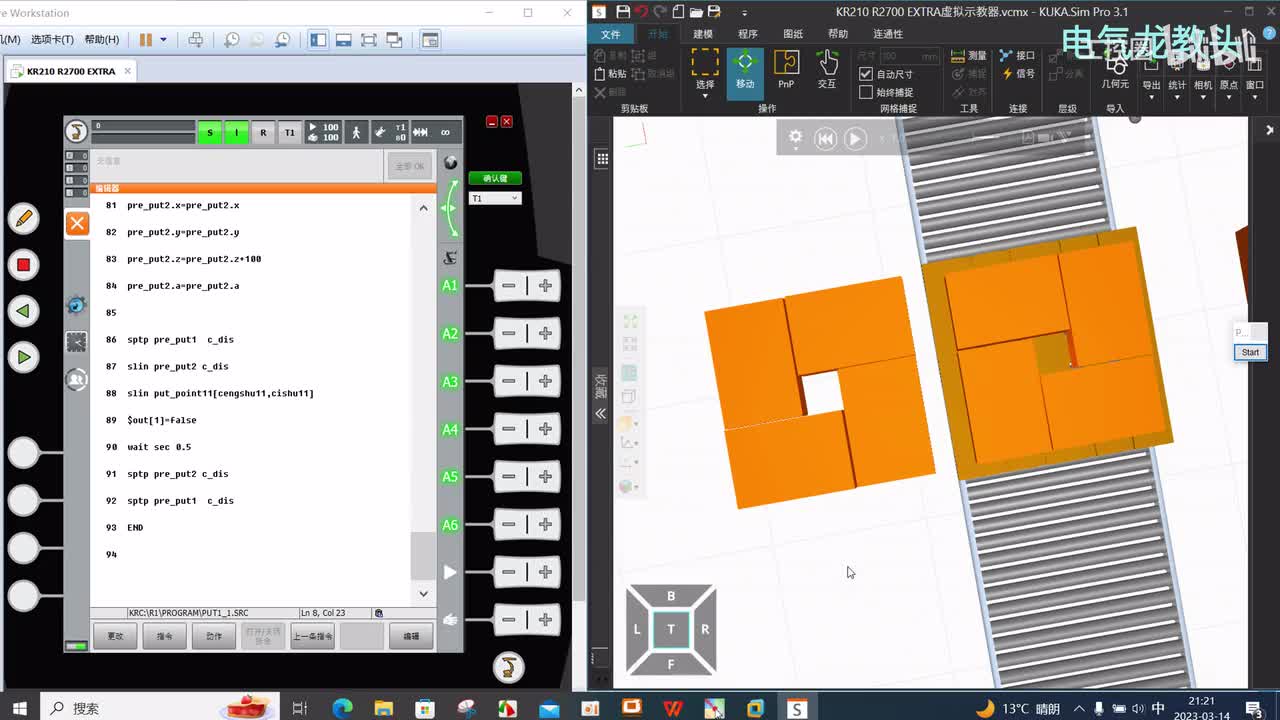
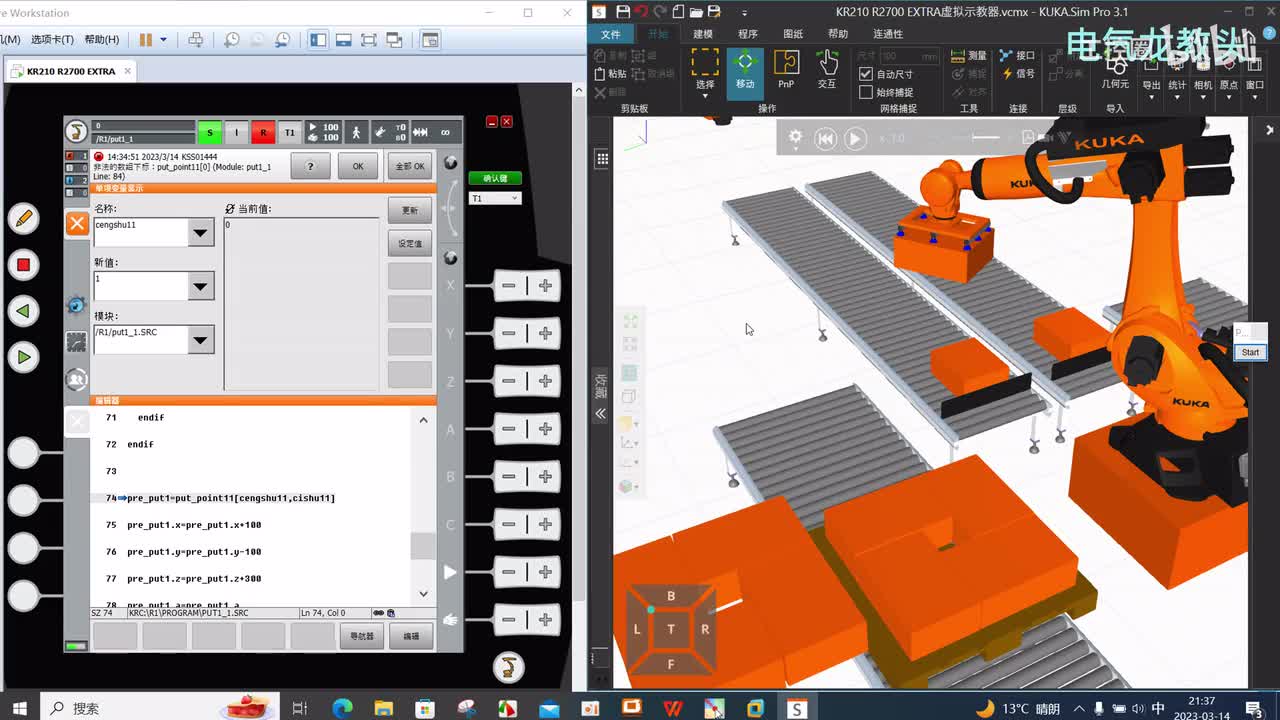
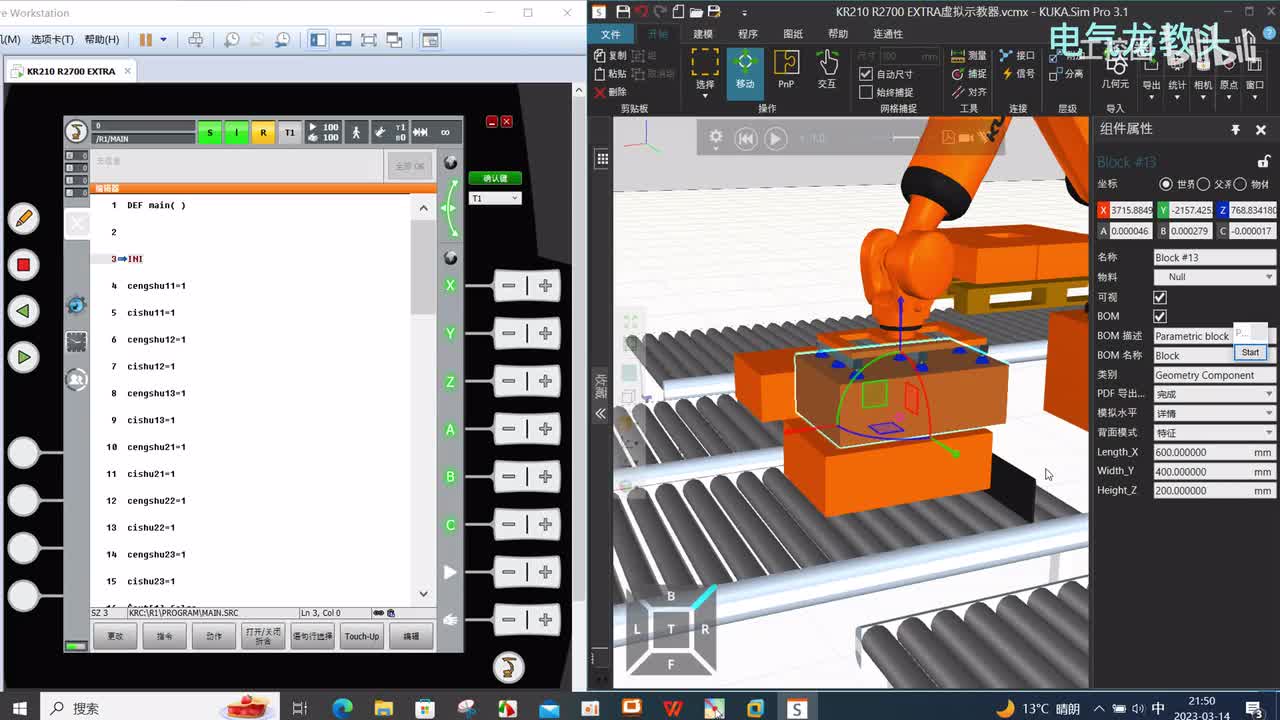
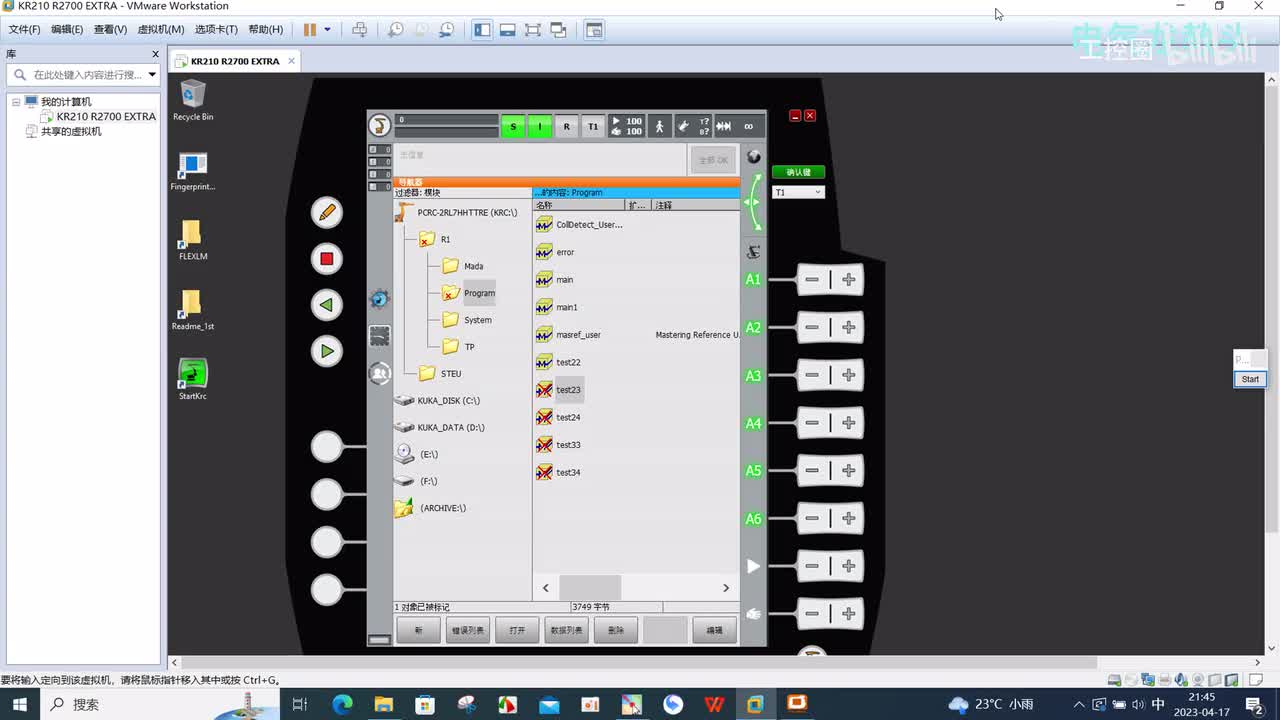
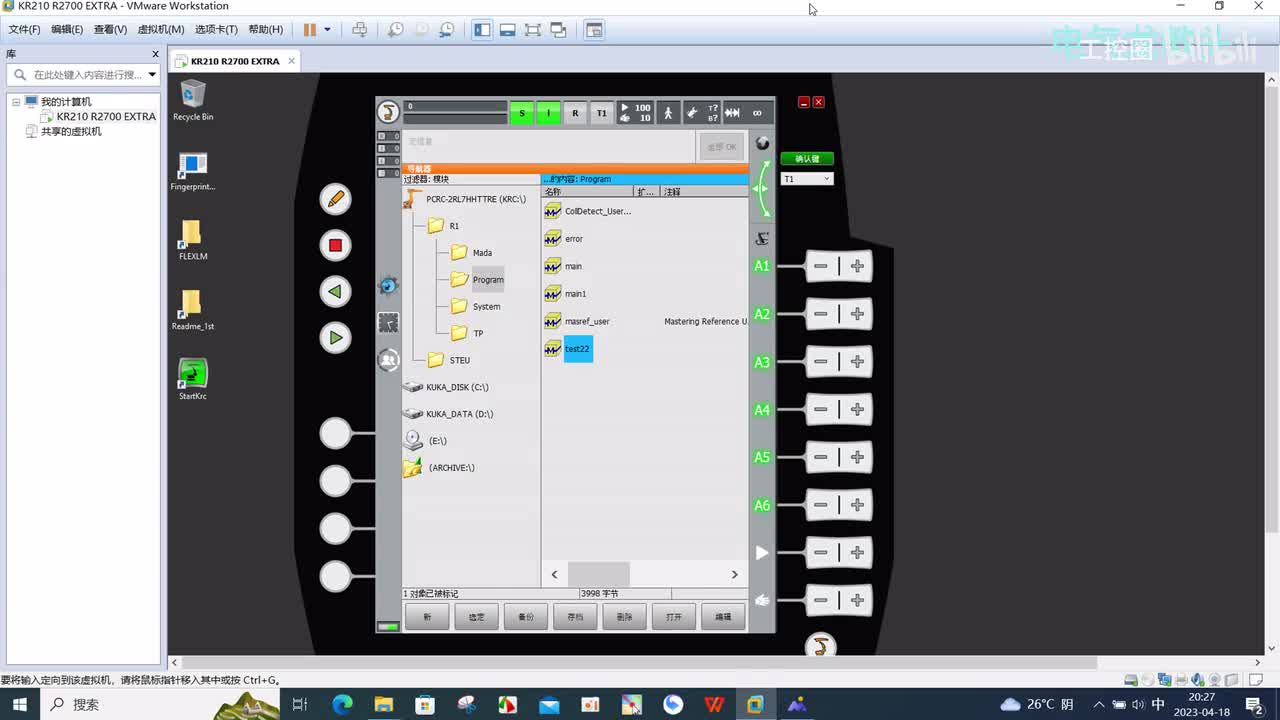
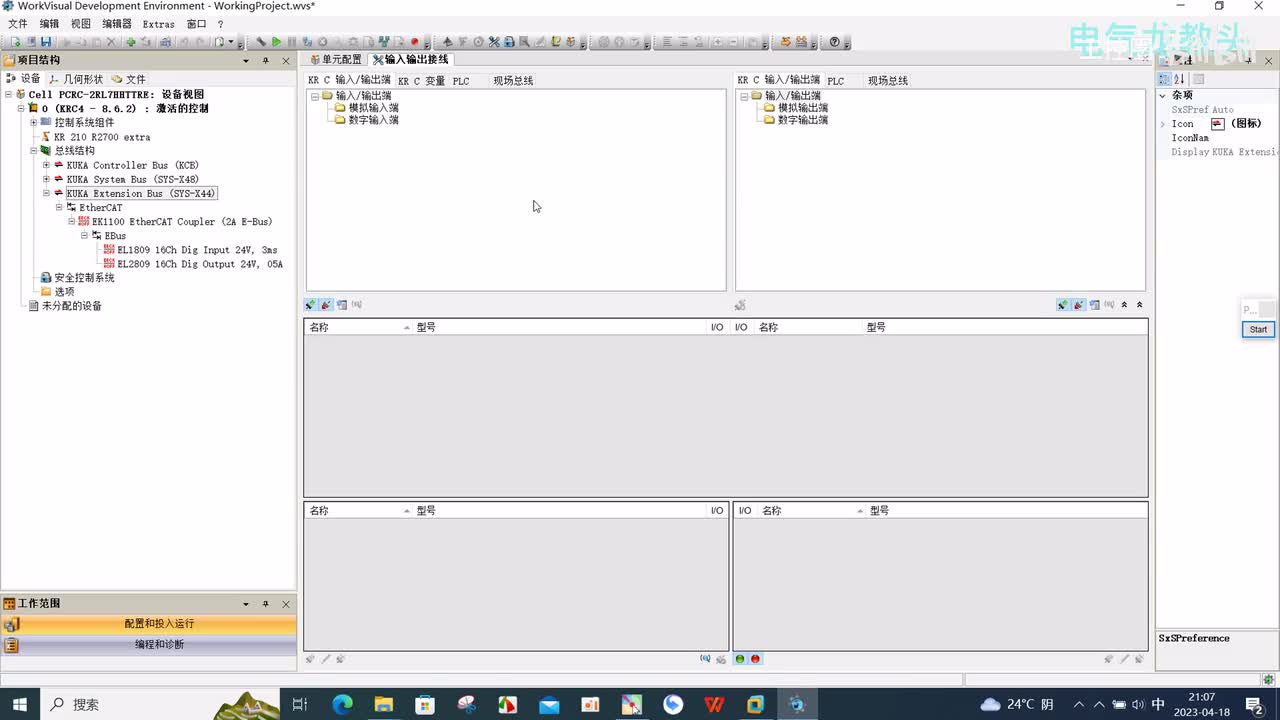
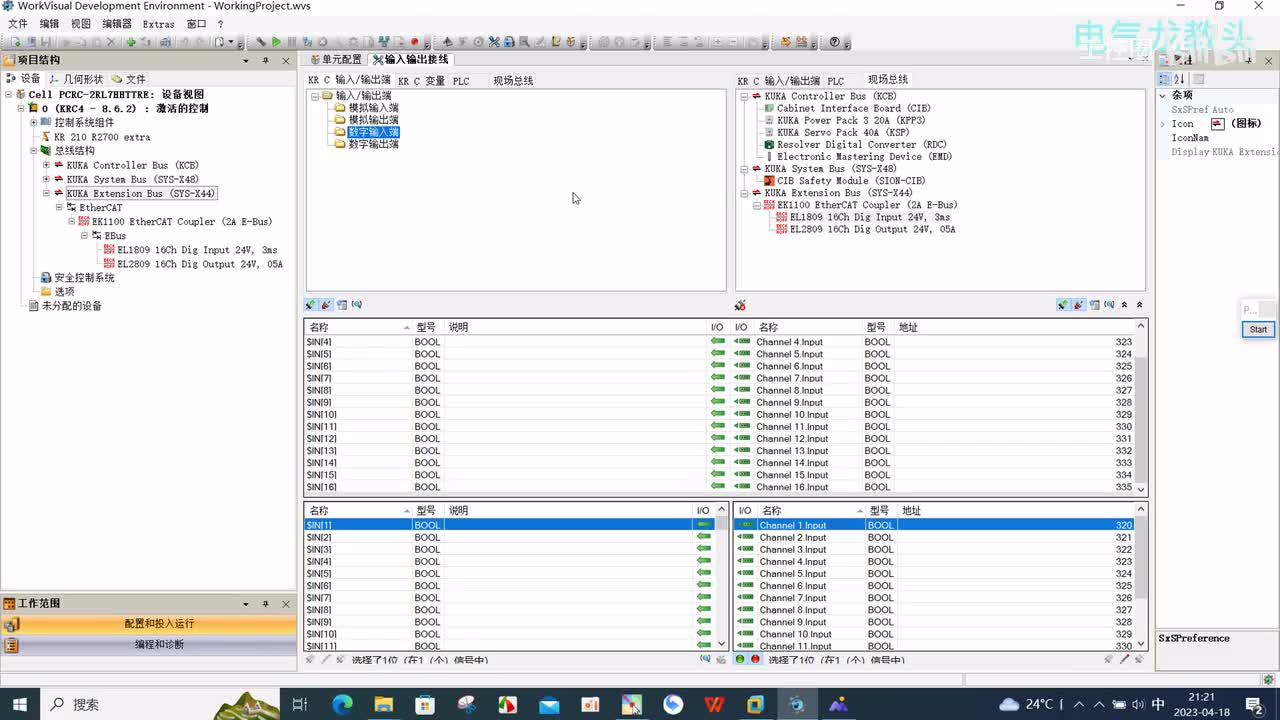
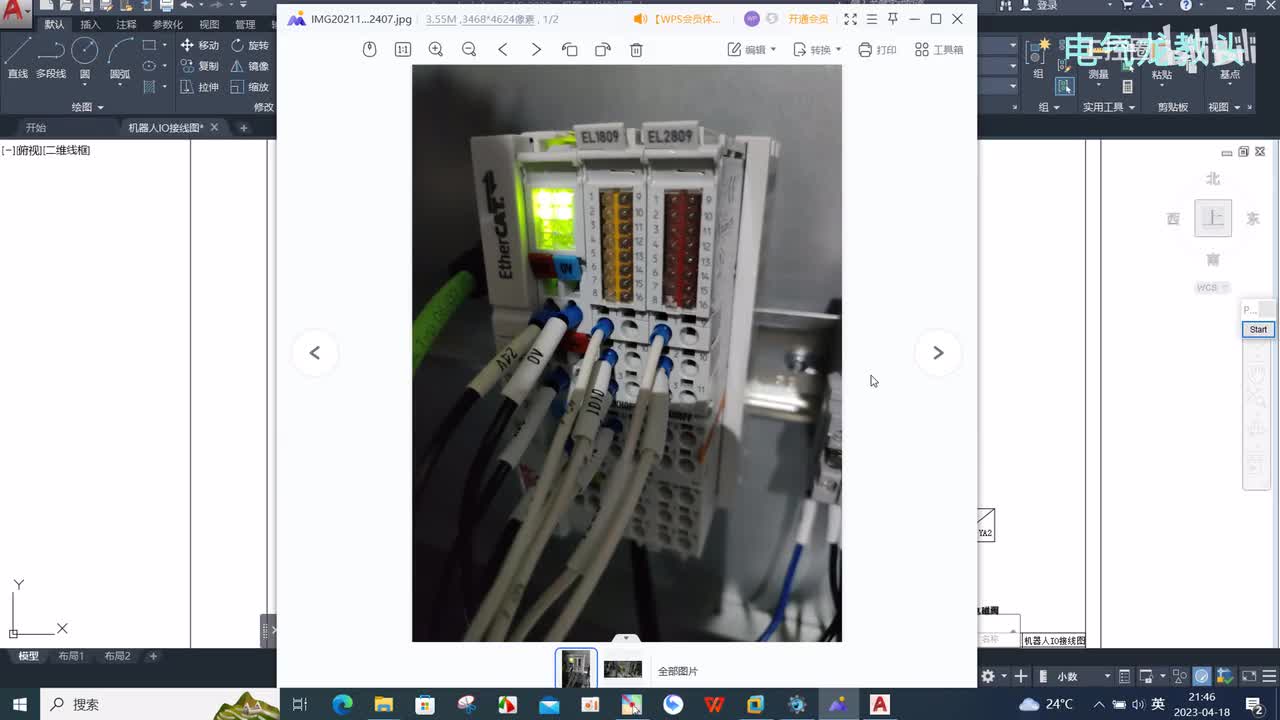
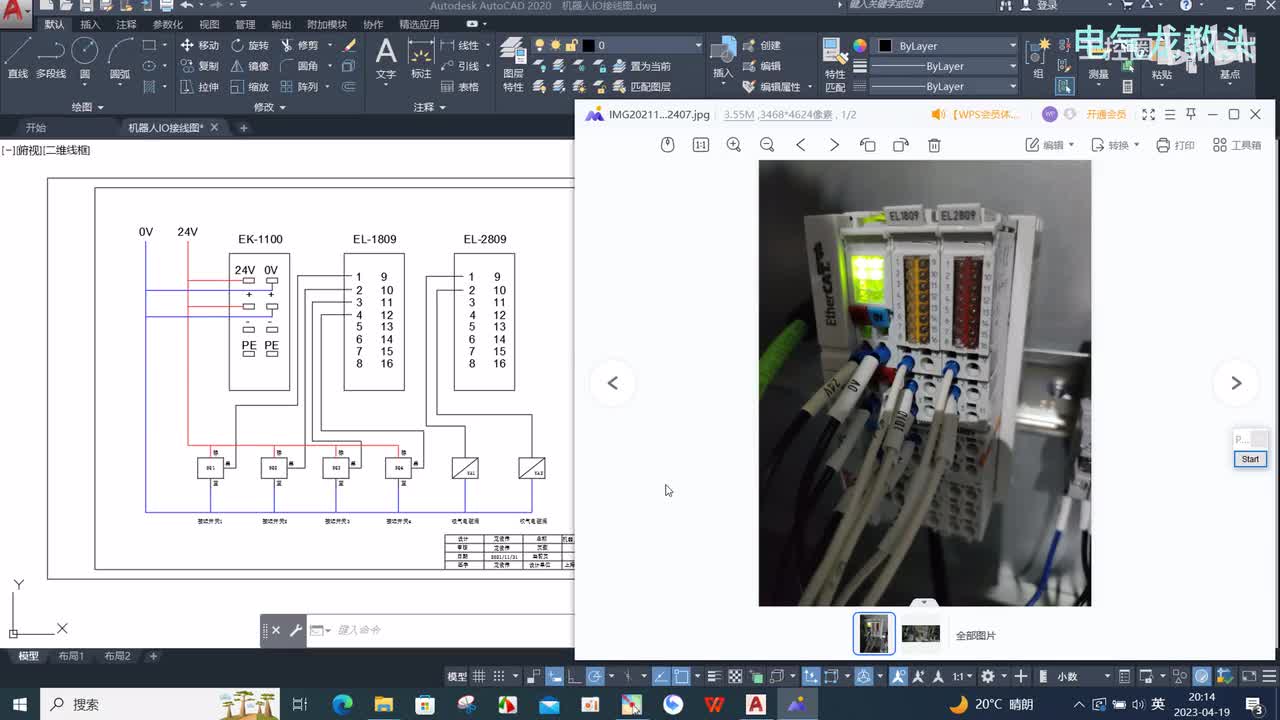
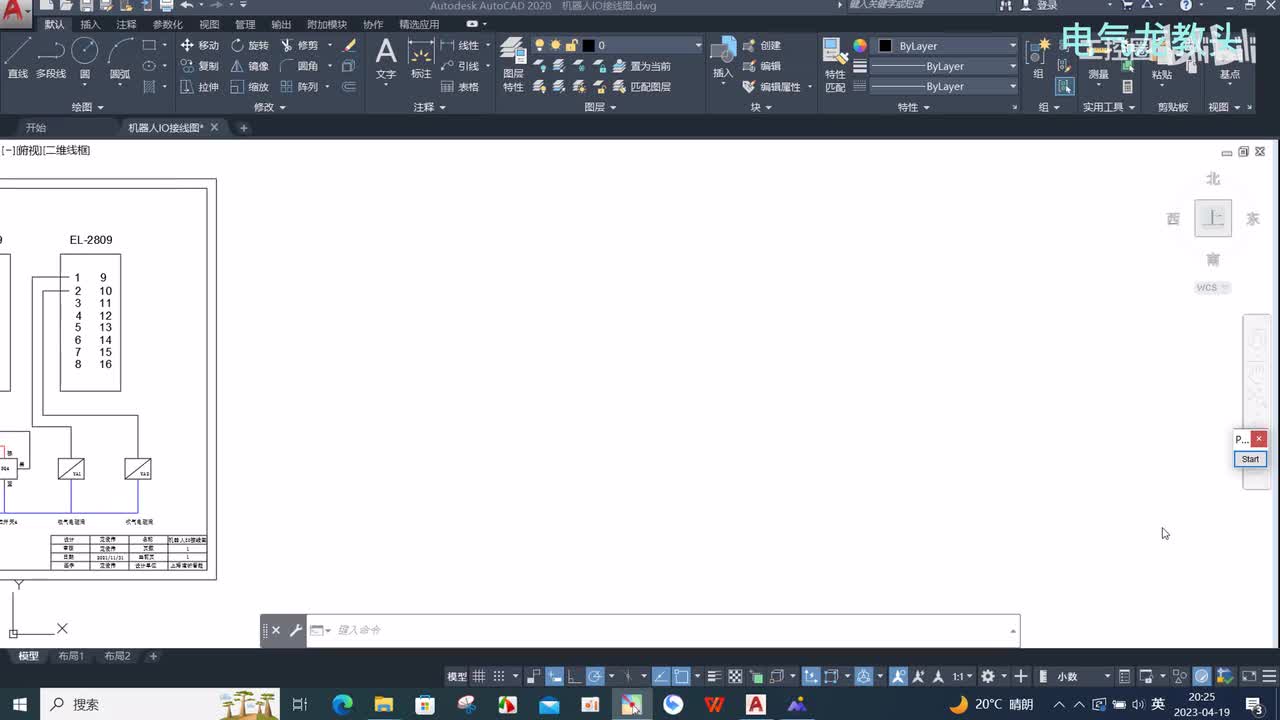
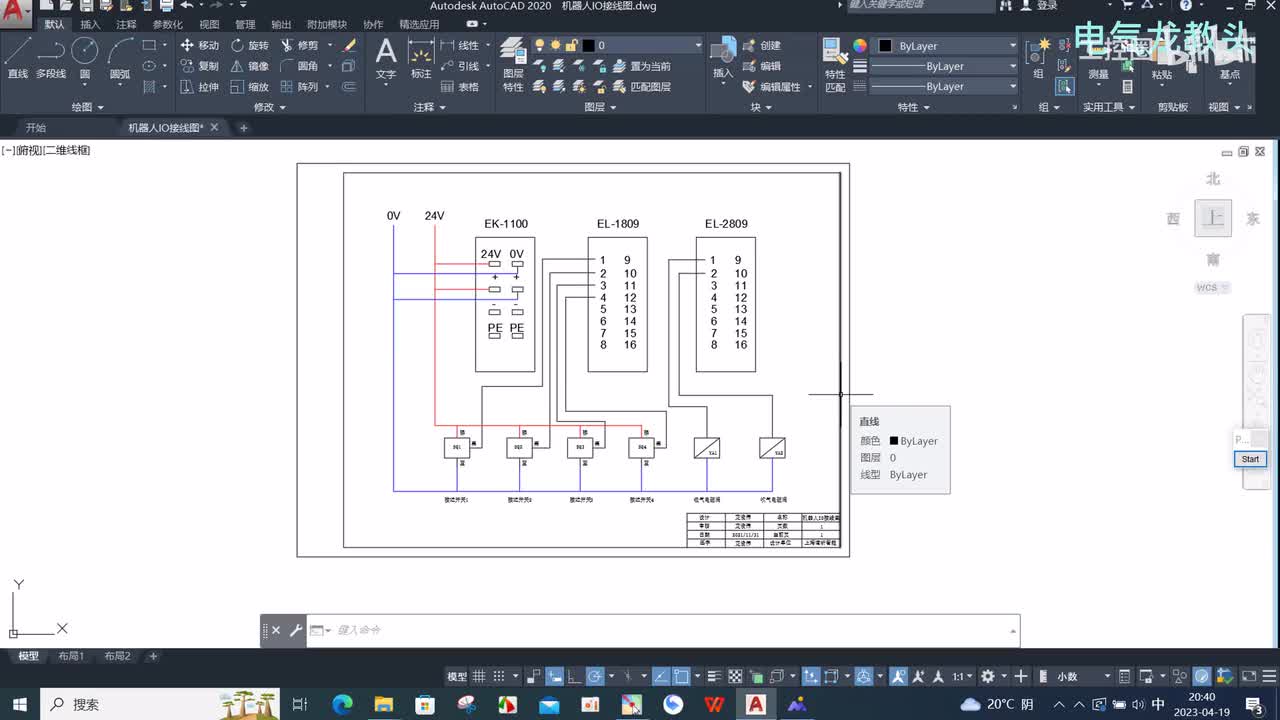
视频选集 1.1 课程概述 1.2 什么是机器人 1.3 国际四大机器人家族 1.4 国内四大机器人家族 1.5 库卡机器人发展史 1.6 工业机器人应用领域和发展前景 1.7 怎样学习工业机器人 2.1 控制系统概述 2.2 库卡机器人控制系统的组成 2.3 机器人本体结构的介绍 2.4 库卡控制柜分类 2.5 KRC5控制系统介绍 2.6 电缆的连接 2.7 开关机和冷启动的方法 2.8 KRC4标准柜安全信号的短接 2.9 KRC4微型柜安全信号的短接 2.10 KRC5微型柜安全信号的短接 2.11 控制柜内部结构 2.12 库卡控制柜对电源的要求 3.1 示教器简介 3.2 示教器前面板介绍1 3.3 示教器前面板介绍2 3.4 示教器后面板介绍 3.5 第二代示教器介绍 3.6 示教器屏幕内功能区介绍1 3.7 示教器屏幕内功能区介绍2 3.8 示教器屏幕内功能区介绍3 3.9 示教器屏幕内功能区介绍4 3.10 示教器菜单键介绍 3.11 6D鼠标的操作演示 4.1 坐标系的概念及什么是轴坐标 4.2 坐标系之间的相互关系 4.3 在全局坐标系下移动机器人 4.4 用3点法测量基座标 4.5 用间接法测量基座标 4.6 用直接输入法测量基座标 4.7 用XYZ4点法、5D法和6D法测量工具坐标 4.8 用XYZ参照法和ABC两点法测量工具坐标1 4.9 用XYZ参照法和ABC两点法测量工具坐标2 4.10 负载数据和负载检测 5.1 轴坐标的优势和应用 5.2 全局坐标的应用 5.3 基座标的应用 5.4 工具坐标系的应用1 5.5 工具坐标系的应用2 5.6 工具坐标在搬运中的应用3 5.7 工具坐标在焊接中的应用 5.8 坐标系应用的总结 6.1 如何创建程序和程序文件夹 6.2 SRC和DAT文件有什么区别 6.3 运动类型的介绍 6.4 SPTP和SLIN运动类型的演示 6.5 SCIRC运动类型的演示 6.6 什么是逼近 6.7 什么是BCO运行 6.8 简单的案例程序讲解 6.9 不带S的运动类型测试 6.10 引起动作停顿的两个原因 7.1 T1手动慢速模式 7.2 T2手动快速模式 7.3 AUT内部自动运行模式 7.4 外部自动运行模式 7.5 什么是投入运行模式 7.6 投入运行模式演示 8.1 程序的结构 8.2 子程序的调用 8.3 全局子程序和局部子程序 8.4 局部子程序运动语句需要注意的问题 8.5 变量声明的规则 8.6 在SRC文件中声明变量 8.7 在DAT文件中声明变量 8.8 在全局数据列表中声明变量 8.9 被允许双重定义变量的方式 8.10 常量的定义和本章内容总结 9.1 逻辑编程基础概述 9.2 如何监控输入输出端口信号 9.3 对输入输出端口的操作 9.4 运动语句的联机表格详解 9.5 其他常用指令的联机表格 9.6 脉冲输出指令的应用 9.7 其他常用逻辑指令介绍 9.8 DECL变量声明指令的使用 9.9 if判断语句的使用规则 9.10 if语句的程序演示 9.11 while循环的使用 9.12 while循环的多条件判断 9.13 repeat_until循环的使用 9.14 loop循环的深入学习 9.15 for循环的使用 9.16 带有步幅的for循环 9.17 switch_case的使用 9.18 怎样触发一次预进停止 10.1 把输入输出端口定义成变量 10.2 signal指令的使用 10.3 什么是零点 10.4 零点校正的要求 10.5 零点校正的步骤 10.6 零点校正的操作方法 10.7 千分表调整零点的原理 10.8 用U盘进行程序备份 10.9 用U盘进行程序还原 10.10 码垛搬运程序结构 10.11 单次码垛的演示 10.12 一层4次的码垛程序演示 10.13 用for循环搭建码垛程序结构 10.14 设置码垛参考点 10.15 码垛动作详解 10.16 计算每一层每一次的位置 10.17 计算预防点的位置数据 10.18 程序排故和更改运动类型 10.19 码垛全过程演示 10.20 简单码垛案例总结分析 10.21 复杂码垛项目的介绍 10.22 新建所需的子程序 10.23 复杂码垛程序框架搭建 10.24 位置偏移计算原理和方法 10.25 位置计算方法详解 10.26 修改工作点位 10.27 初次调试运行 10.28 复杂码垛的全过程调试 10.29 如何新建变量监控表 10.30 修改第二条线的点位 10.31 双线码垛联调联试全过程 11.1 库卡机器人软件介绍 11.2 workvisual6.0和kuka laod5.0软件的下载 11.3 workvisual6.0软件安装过程 11.4 KUKA load5.0软件安装过程 11.5 OrangeEdit软件的安装过程 11.6 如何用workvisual上传项目 11.7 如何用workvisual进行在线编程 11.8 如何用workvisual进行程序注释 11.9 如何用OrangeEdit进行离线编程1 11.10 如何用OrangeEdit进行离线编程2 11.11 如何移植别的项目程序文件1 11.12 如何移植别的项目程序文件2 12.1 库卡IO模块的介绍 12.2 如何配置IO模块 12.3 如何进行IO映射 12.4 怎样配置多个输入输出模块 12.5 IO模块的接线原理1 12.6 IO模块的接线原理(PNP) 12.7 IO模块的接线原理(NPN) 12.8 库卡IO模块接线电气原理图讲解 13.1 奇点的概念 13.2 过顶奇点位置演示1 13.3 过顶奇点的位置演示2 13.4 用程序测试过顶奇点 13.5 延伸位置奇点的演示与测试 13.6 手轴奇点概念 13.7 手轴奇点的演示 13.8 用程序测试手轴奇点
工控圈的视频 KUKA库卡机器人精讲(入门篇) EPLAN电气设计实战应用 船舶电气设备及系统(很少见) 怎样看电力系统二次回路 电力系统入门到精通【下】 电力系统入门到精通【上】 西门子S7-200PLC入门详解 电气控制及PLC可编程控制器 消防弱电系统施工安装原理接线调试编程技术 西门子S7-1200PLC入门到精通_下 和利时DCS集散控制系统 电子元器件工作原理及应用精讲 电工电路从入门到精通 C#上位机开发零基础入门到精通全套视频 家电维修入门到精通 AB罗克韦尔大中型Logix5000PLC编程视频教程 汇川PLC零基础入门讲解 HollySys和利时DCS视频精选 电工入门到精通实操 LabVIEW程序设计入门到精通(修正版)