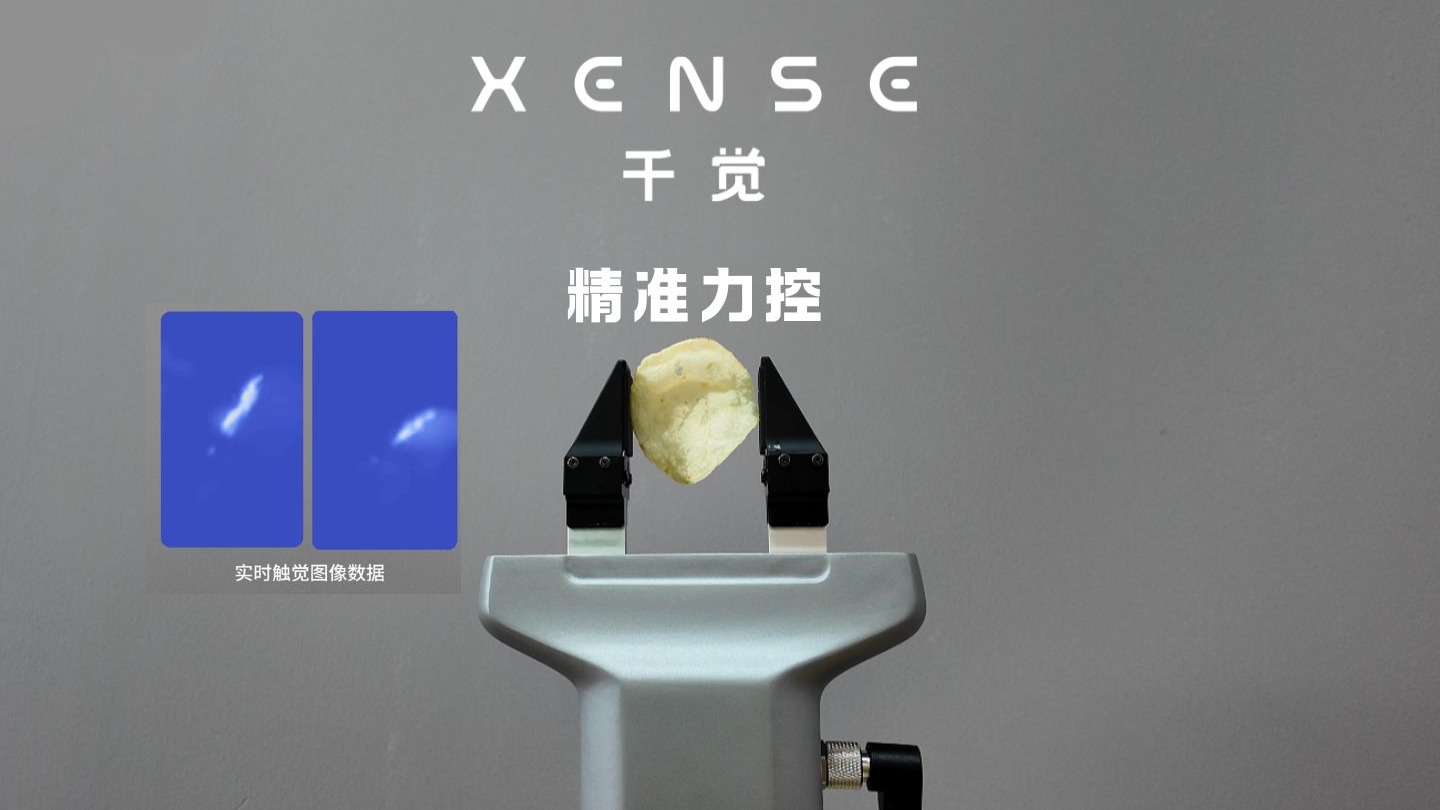
UP主: 封面: 简介:通过将高精度触觉传感器与具身智能算法框架深度融合,系统能实时感知、分析并动态调整动作。得益于 0.06 mm 级变形场与 0.01 N 级力觉精度,机器人能在 0.1~0.5 mm 装配间...