UP主: 封面: 简介:本教程基于ABB工业机器人操作系统RobotWare7.0以上版本的最新一代OmniCore控制器,围绕着从认识到熟练操作ABB工业机器人,能够独立完成工业机器人的基本操作,以及根据实际...
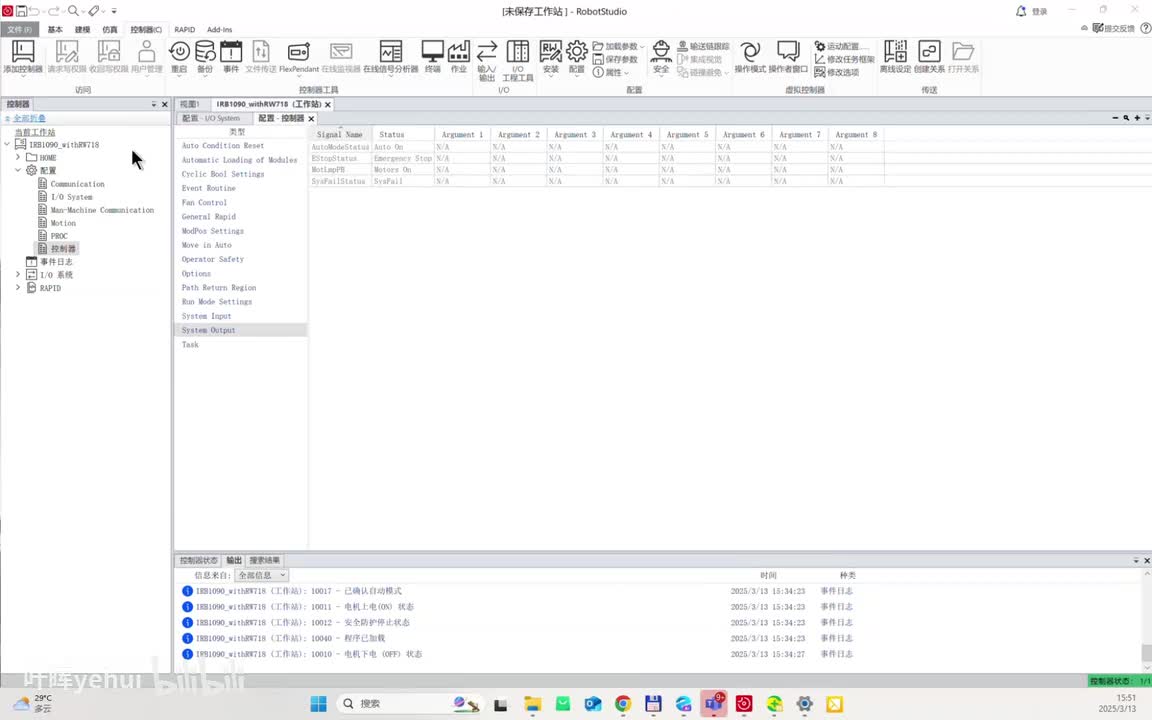
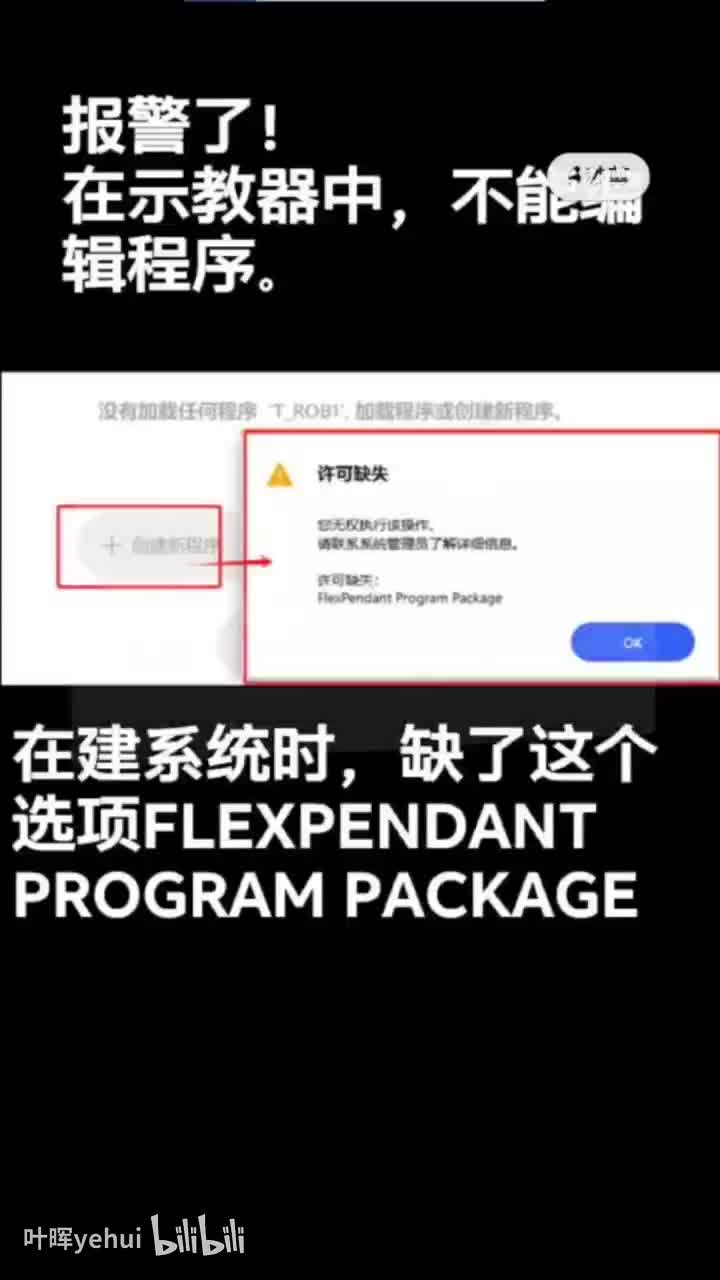
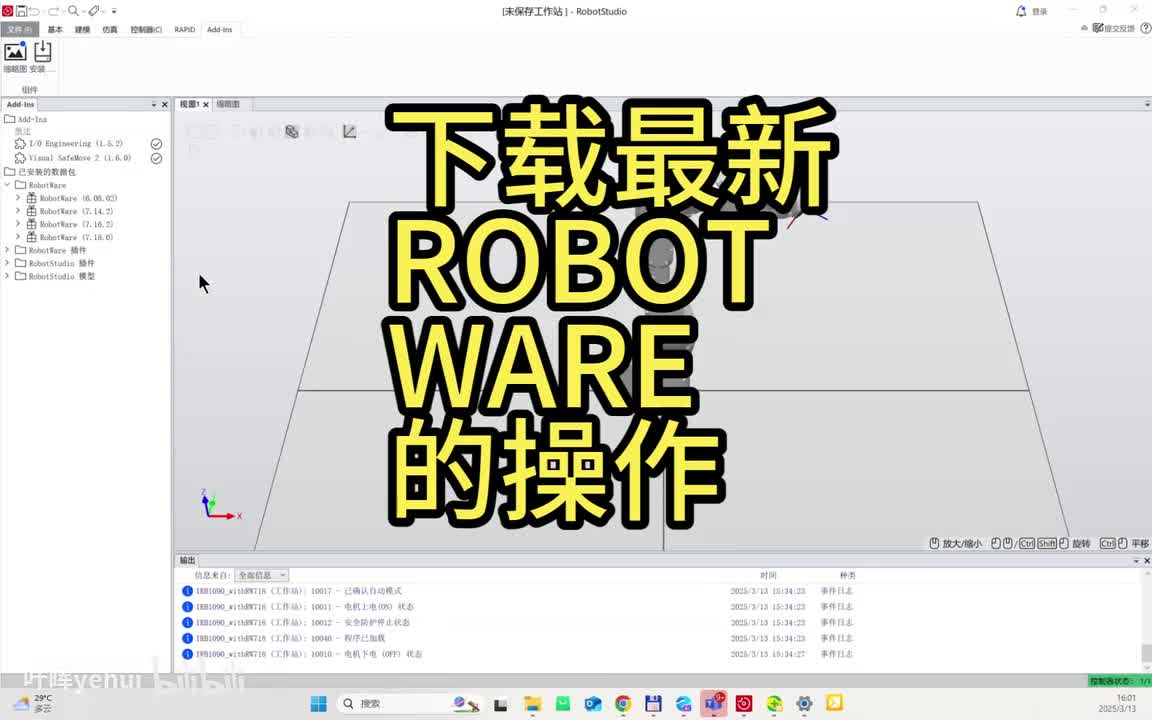
视频选集 1-1 工业机器人的现状与趋势 1-2掌握工业机器人的典型结构与分类 1-3掌握用好ABB机器人的要求 1-4工业机器人安全操作的注意事项 1-5构建基础练习用的工业机器人虚拟工作站 2-1工业机器人底座安装固定 2-2工业机器人第六轴法兰盘工具的安装固定 2-3工业机器人本体与控制柜电气连接操作 3-1认识示教器—配置必要的操作环境 3-2查看工业机器人常用信息与事件日志 3-3工业机器人数据的备份与恢复 3-4 工业机器人的手动操纵 3-5工业机器人的转数计数器更新操作 4-1了解ABB机器人IO通信的种类 4-2A配置控制柜E10和C30的IO模块 4-2配置OmniCore 紧凑型控制柜C30标准IO模块DSQC1030 4-3配置OmniCore 紧凑型控制器标准IO接口 4-4IO信号的监控与操作 4-5配置工业网络PROFINET的操作 4-6配置工业网络EtherNetIP的操作 4-7设置系统输入输出与IO信号的关联 4-7B新版本robotware系统输入输出的菜单位置变化 4-8设置示教器上的可编程按键 4-9安全保护机制的设置 5-1认识机器人运动指令调用的程序数据 5-2建立程序数据的操作 5-3程序数据类型与分类 5-4常用程序数据说明 5-5工具数据tooldata的设定 5-5AABB机器人TCP对准工件坐标的操作 5-5B搬运类工具数据tooldata的设定 5-6工件数据wobjdata的设定 5-7有效载荷数据loaddata的设定 6-1实战图形化程序编程 6-2什么是任务程序模块和例行程序 6-3掌握常用的Rapid程序指令 6-4建立一个可以运行的基本RAPID程序 6-5基本RAPID程序的调试 6-6创建带参数的例行程序 6-7创建中断程序 6-8 功能FUNCTION的使用 7-1ABB工业机器人轨迹应用的调试 7-2ABB工业机器人搬运应用的调试 7-3ABB工业机器人Socket数据通讯应用的调试 7-4工业机器人安装调试一般步骤 8-1 查阅机器人系统信息 8-2机器人系统重启的操作 8-3认识常用的服务例行程序的功能 8-4使用仪表盘功能快捷 8-5使用WEB前端技术开发机器人APP 8-6掌握ABB机器人电子说明书的查阅方法 示教器无法编程程序 20240821ABB机器人OMNICORE控制器检修信息复位操作 ABB机器人omnicore e10首次上电急停报警处理方法 20250313下载最新ROBOTWARE的操作 20250822程序结构系统参数控制器生成文件的说明 20251105CClinkIE的配置实战 20251105EthernetIP配置实战