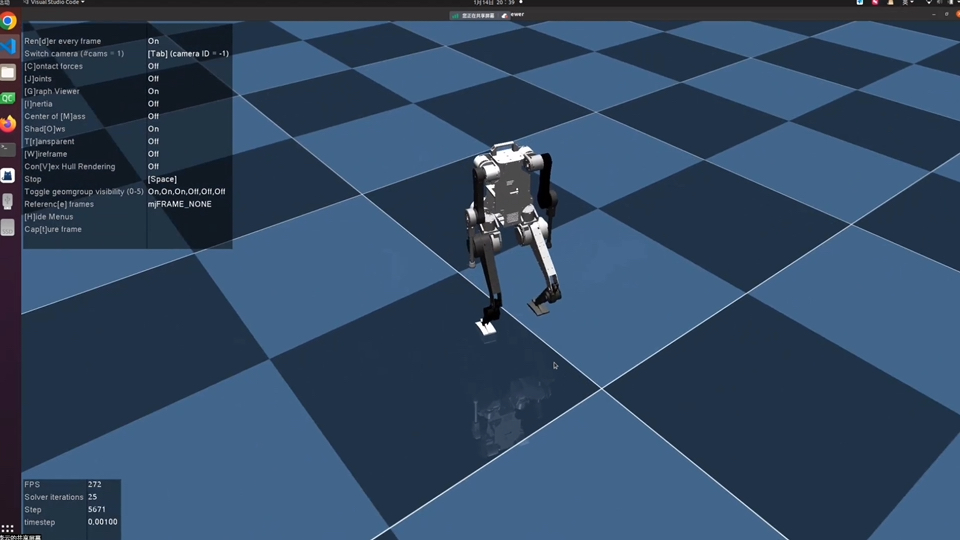
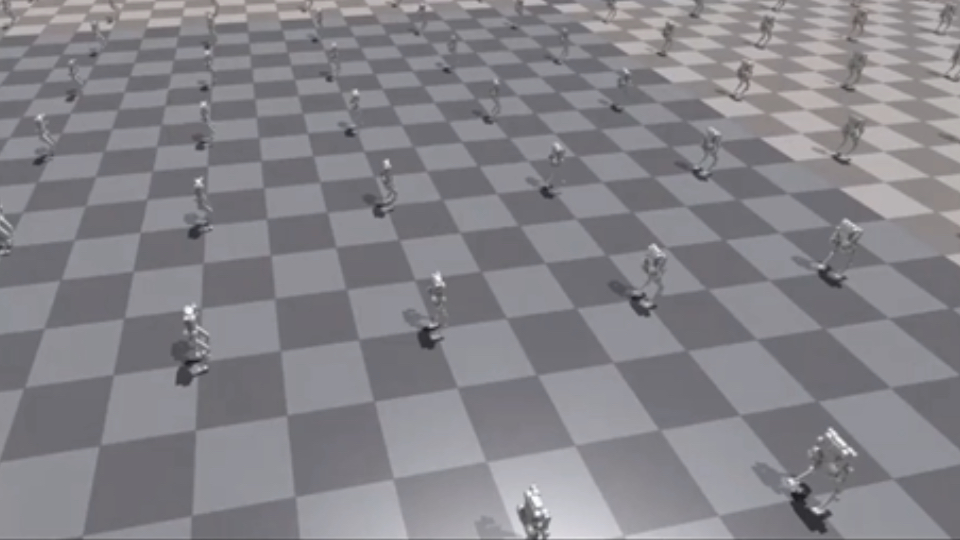
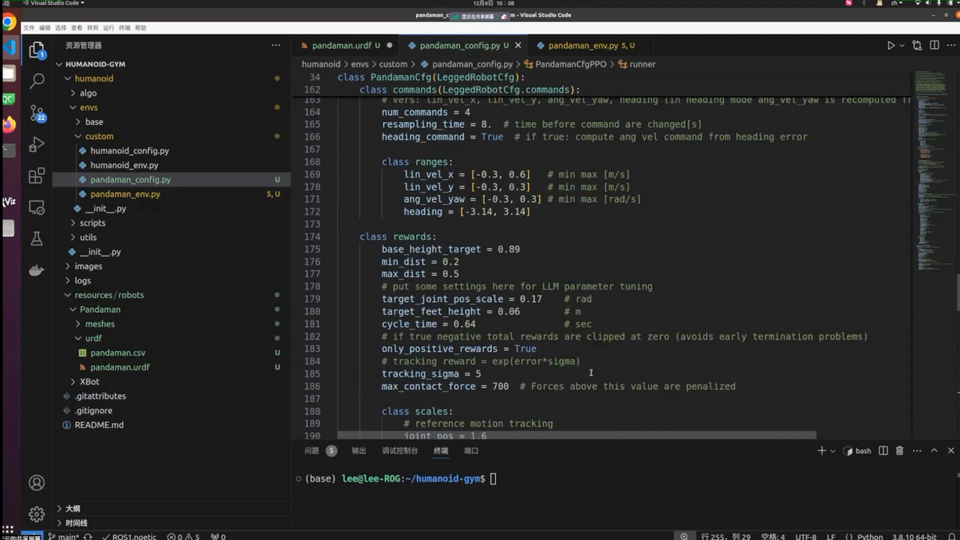
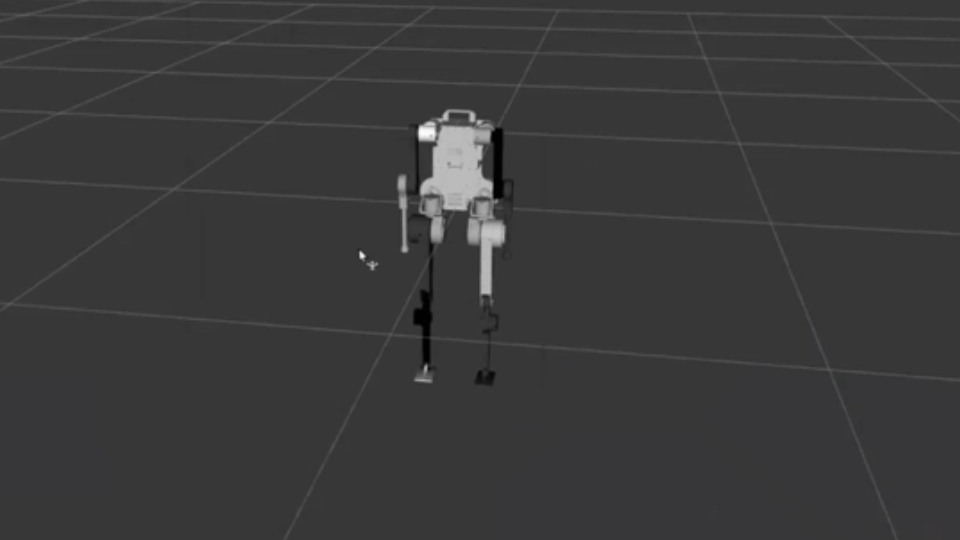
科技猿Origin的视频 人形机器人强化学习入门5:导入mujoco进行sim2sim 人形机器人强化学习入门4:humanoid-gym框架移植自己的机器人模型(下) 人形机器人强化学习入门3:humanoid-gym框架移植自己的机器人模型(上) 人形机器人强化学习入门2:urdf在rviz中显示并修改 人形机器人强化学习入门1:solidworks模型转urdf 人形机器人强化学习入门0:isaac-gym训练并sim2sim效果展示 人形机器人强化学习入门6:Gazebo部署开源