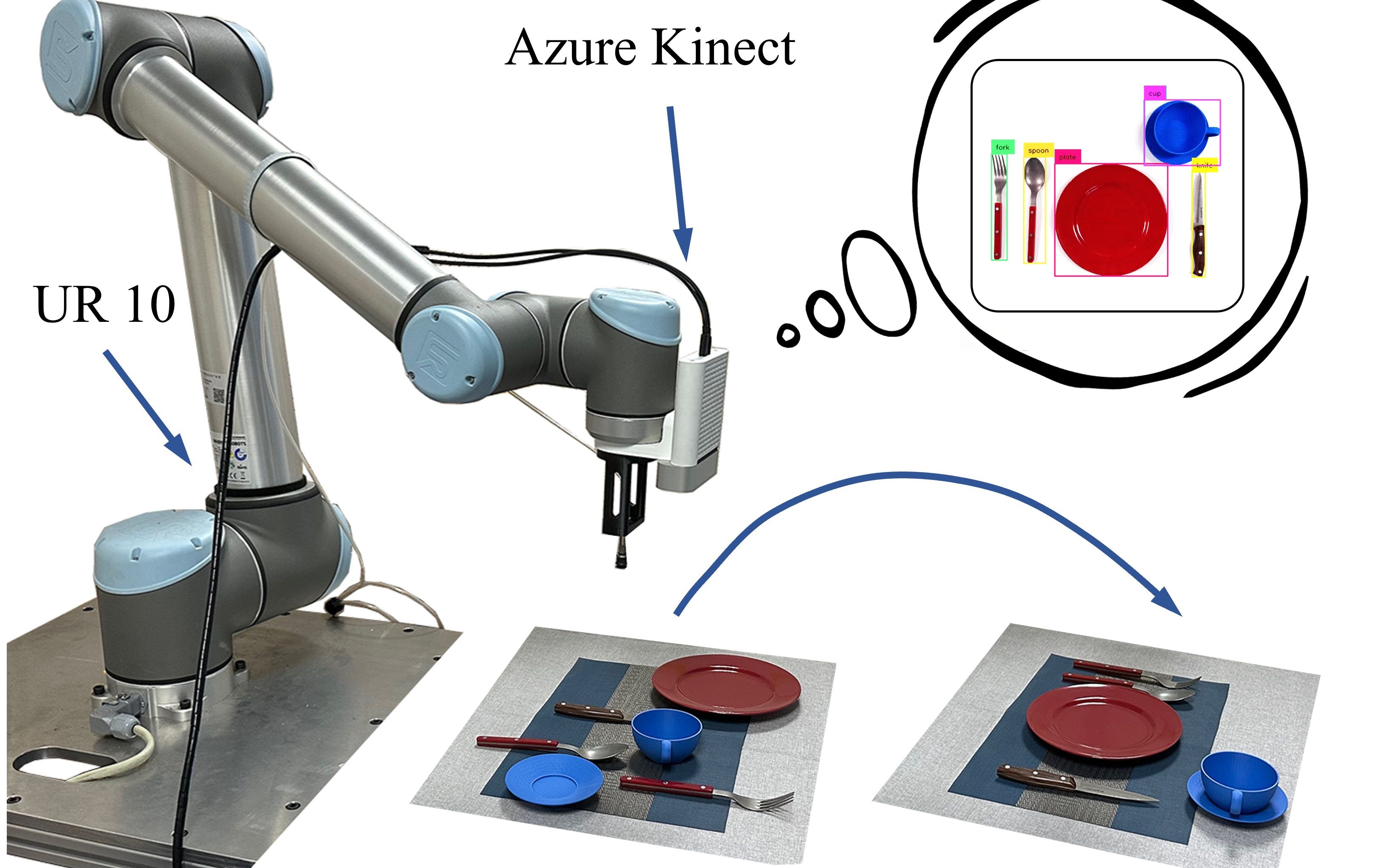
UP主: 封面: 简介:论文标题:LVDiffusor: Distilling Functional Rearrangement Priors From Large Models Into Diffusor论文链接:https://ieeexplore.ieee.org/abstract/document/10621583...
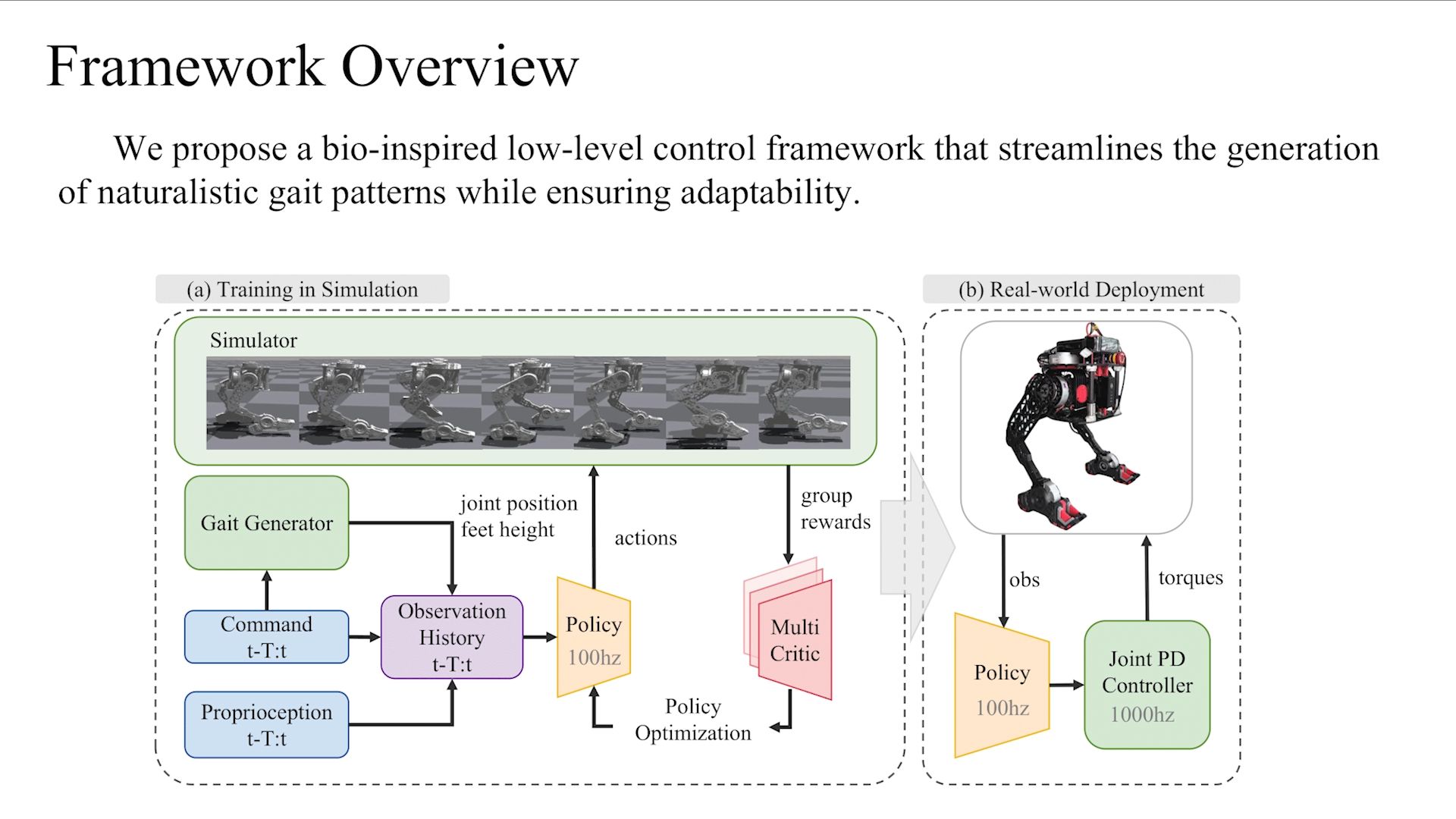
中山大学RAPID机器人Lab的视频 瞬时强烈扰动条件下面向双向推力四轴飞行器的鲁棒控制方法(ICRA 2024) 机器人自主整理桌面:从大模型蒸馏功能性桌面物品布局知识 (RAL 2024) 基于生物力学原理的混合步态双足机器人运动表示与模型引导强化学习(IROS 2025)