UP主: 封面: 简介:https://www.coursera.org/learn/robotics1/home【台大机器人学之动力学——林沛群】运动学链接:https://www.bilibili.com/video/av54047883/【声明】自学教程,教程源于...
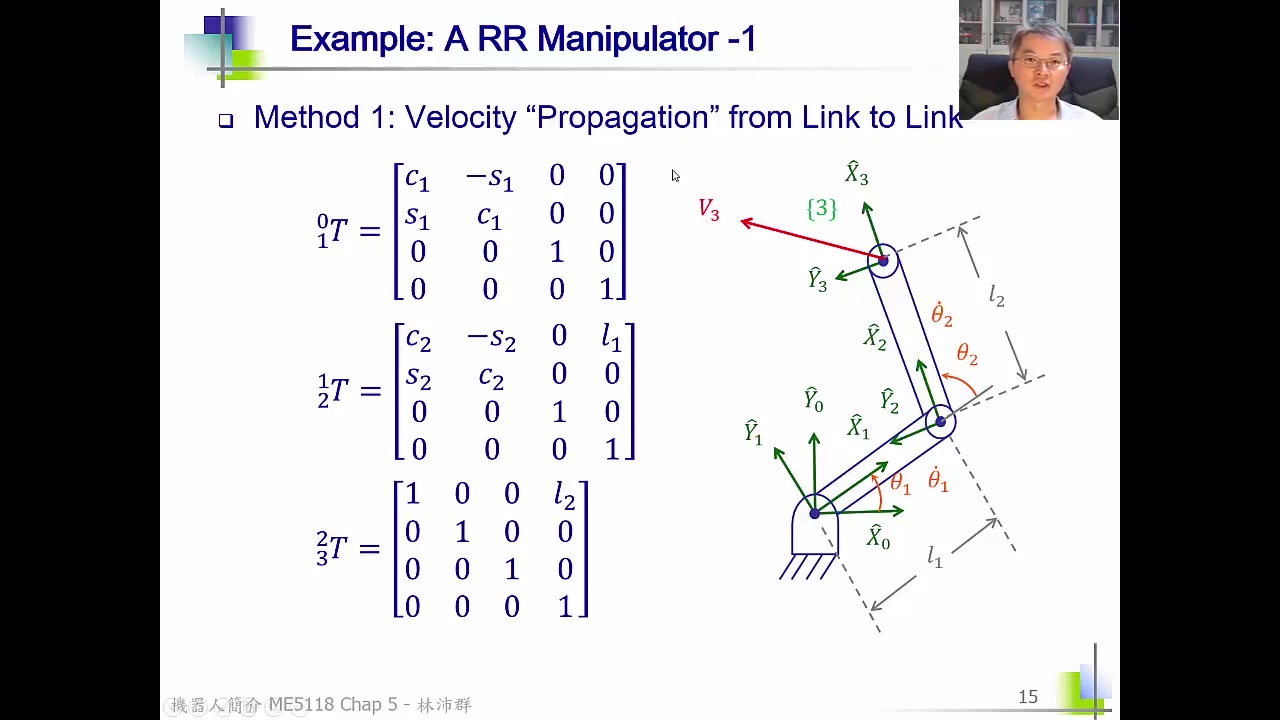
视频选集 01、5-1 Time-varying position and orientation 02、5-2 Rigid body motion 03、5-3 Velocity propagation 04、5-4 Jacobians 05、5-5 Example A RR manipulator 06、5-6 Static forces 07、5-7 Example A RR manipulator 08、5-8 Jacobian in the force domain 09、6-1 Rigid body motion 10、6-2 Mass distribution 11、6-3 Acceleration propagation 12、6-4 Example A RR manipulator 13、6-5 Structure of dynamic equation 14、6-6 Lagrangian formulation 15、6-7 Example A RP manipulator 16、6-8 Torque equation